3.7 Advanced: Bandwidth and Quality Factor
3.7.1 Bandwidth and quality factor of poles
The overall behavior of a filter is dictated by the combined effect of its poles and zeros. The position of a pole in the or plane determines how it influences the overall system function ( or , respectively).
It can be shown that asymptotically each pole contributes with a roll-off of 20 dB per decade (equivalent to 6 dB per octave) and a zero with an increase of 20 dB per decade. This asymptotic behavior is used to obtain graphs known as Bode diagrams. This clearly indicates that the sharpness of a frequency response (shorter transition regions) can be improved by increasing the order of the corresponding system function (or ), i. e., adding poles and/or zeros. However, increasing the order of an analog filter requires more components (capacitors, opamps, etc.) and for a digital filter it requires more multiplications and additions. Hence, it is important to make the best use of poles (and zeros) and, motivated by that, to have figures of merit for them.
Besides its frequency, the bandwidth and quality factor of a single pole or zero are important to assess its influence. Poles will be emphasized in this section, but similar definitions are applied to zeros. This section discusses characteristics of a single pole while Section 3.7.2 extends the definitions to filters.
Bandwidth of a pole
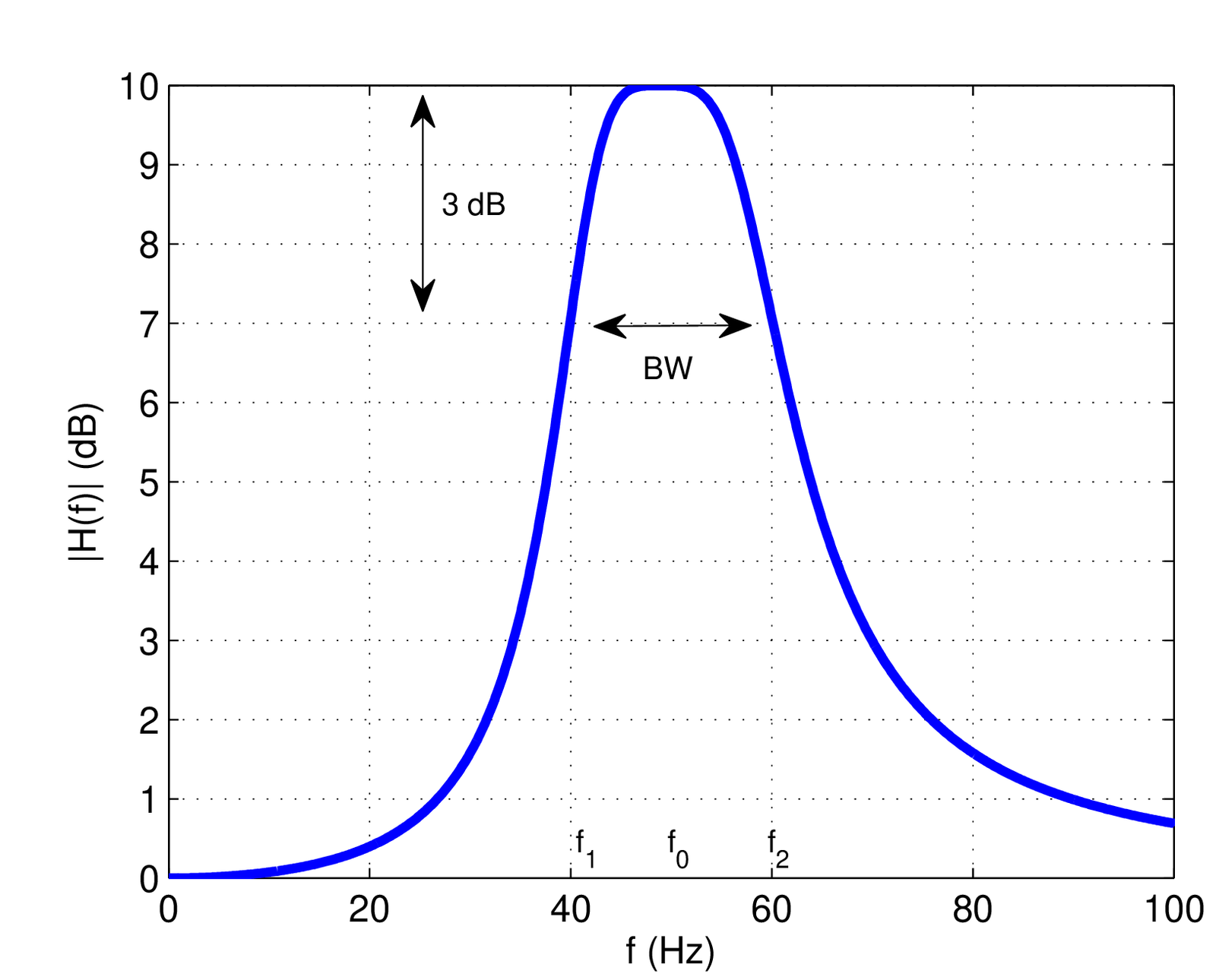
The bandwidth of a pole is illustrated in Figure 3.22 and defined here as , where the cutoff frequencies and are those in which the gain at the center frequency (that may be different than the natural frequency ) has decreased to . The factor corresponds to dB, or approximately dB. Therefore, this definition is called the 3-dB bandwidth or half-power BW.
Pole bandwidth in continuous-time
Assuming a first-order system , where is the pole, the bandwidth of in Hz is given by
|
| (3.33) |
This result can be obtained by noting that for any frequency
Hence, the squared gain at the specific pole frequency is
and the squared gains at cutoff frequencies fall to as required by the definition of cutoff frequency:
|
| (3.34) |
Hence, a range from to is determined by the two cutoff frequencies of a pole at such that its bandwidth is rad/s. Dividing by leads to in Hz, as indicated in Eq. (3.33). A similar relation holds in discrete-time, as follows.
Pole bandwidth in discrete-time
Using the previous results and assuming the transformation of Eq. (2.59), the pole in the plane is mapped into the pole in the plane via
Hence, and . Assuming for a causal and stable , Eq. (3.33) indicates that , such that and
|
| (3.35) |
in Hz for a pole in the plane with .
One can rewrite Eq. (3.35) as and use the Taylor series expansion of around a value
with , to keep only the first two terms and achieve
Hence, the approximation allows to write
|
| (3.36) |
which can be used when is close to 1.
Quality factor of poles
Besides the number of poles and zeros, another factor that influences the sharpness of a frequency response is the quality factor (or -factor) of each pole, which is defined as
|
| (3.37) |
where is the natural frequency in Hz and is the 3-dB bandwidth (also in Hz), as indicated in Figure 3.22.
For a second-order resonator, such as Eq. (3.27), the quality factor can be shown [ url3dsp] to be
|
| (3.38) |
Appplication 3.3 presents a discussion on the influence of the Q-factor in frequency responses.
3.7.2 Bandwidth and quality factor of filters
The previous definitions of bandwidth and Q-factor of poles can be extended to systems, especially frequency-selective filters such as bandpass and lowpass.
Bandwidth definitions for signals and systems
For a generic system there are definitions for the bandwidth () other than the 3-dB bandwidth of Figure 3.22. In all cases, if the frequency response has Hermitian symmetry, only the positive frequencies are taken in account.
A generalization of BW is to adopt the -dB bandwidth where is the attenuation of interest, such as 1 dB.
Alternatively, the absolute bandwidth can be applied when the signal is bandlimited. It is simply defined as the frequency range in which the spectrum is non-zero. For example, has . Note that in this case the 3-dB BW definition would not be appropriate.
Another alternative definition of is the so-called null-to-null or zero-crossing BW. In the case of a lowpass spectrum, the BW is determined by the first null of (or in discrete-time). For example, a frequency response given by the of Eq. (B.14) has according to this definition. For a passband spectrum, the two neighbor nulls of the center frequency determine BW. For example, the BW of is .
When a signal is complex-valued, its spectrum does not have to exhibit Hermitian symmetry. In this case, the sampling theorem and other results depend on the double-sided or bilateral bandwidth, which takes in account the support of from negative to positive frequencies.
For example, first consider the “conventional” case of corresponding to a real-valued ideal lowpass filter with unitary gain from to 200 Hz: its BW is 200 Hz, and its double-sided bandwidth is 400 Hz. Contrast now with a complex-valued signal with being a square pulse from to 100 Hz as depicted in Figure 3.14. In the latter case, the double-sided bandwidth continues to be 400 Hz but the conventional BW fails to indicate, for example, the minimum according to the sampling theorem. In this case, the sampling theorem could be stated with respect to the double-sided bandwidth.
Another approach when dealing with complex-valued signals is to assume that is zero for negative frequencies (such signals are called “analytic”). In this case, the bandwidth BW takes in account only positive frequencies, as usual, but it may be misleading the fact that the sampling theorem in this case of an analytic signal can be stated as
|
| (3.39) |
For example, if is non-zero from DC to 300 Hz, sampling the corresponding complex-valued (analytic) time-domain signal at Hz suffices to avoid aliasing. In this case, the first spectrum replica at positive frequencies has support from 0 to 300 Hz, the second one from 350 to 650 Hz, and so on, indicating that there is no aliasing.
A bandwidth definition very useful when dealing with filtered white noise is the equivalent noise bandwidth (ENBW). The ENBW of a filter is the bandwidth of a fictitious ideal (e. g., lowpass or bandpass) filter with rectangular spectrum that obeys
|
| (3.40) |
and has the maximum value of is equal to the maximum of . The name ENBW is because both filters lead to the same output power when the input is white noise (discussed in details later, in Section 4.7.2 ) such that the equivalent filter can substitute the original (and more complicated one) while leading, for instance, to the same SNR in a simulation or theoretical development.
An example is provided in Figure 3.23, which was obtained with Matlab’s function9 enbw as informed in Listing 3.9. In this case, the ENBW was times larger than the cutoff frequency.
1Fs = 1000; %sampling frequency in Hz 2fc = 50; %filter cutoff frequency in Hz 3[B,A]=butter(4,fc/(Fs/2)); %4-th order Butterworth filter 4N=100; %number of samples in impulse response hn 5hn = impz(B,A,100); %impulse response 6Hf = fftshift(fft(hn)); %sampled DTFT 7equivalentBW = enbw(hn,Fs); %estimate equivalent noise bandwidth 8%code to plot the figure continues from here...
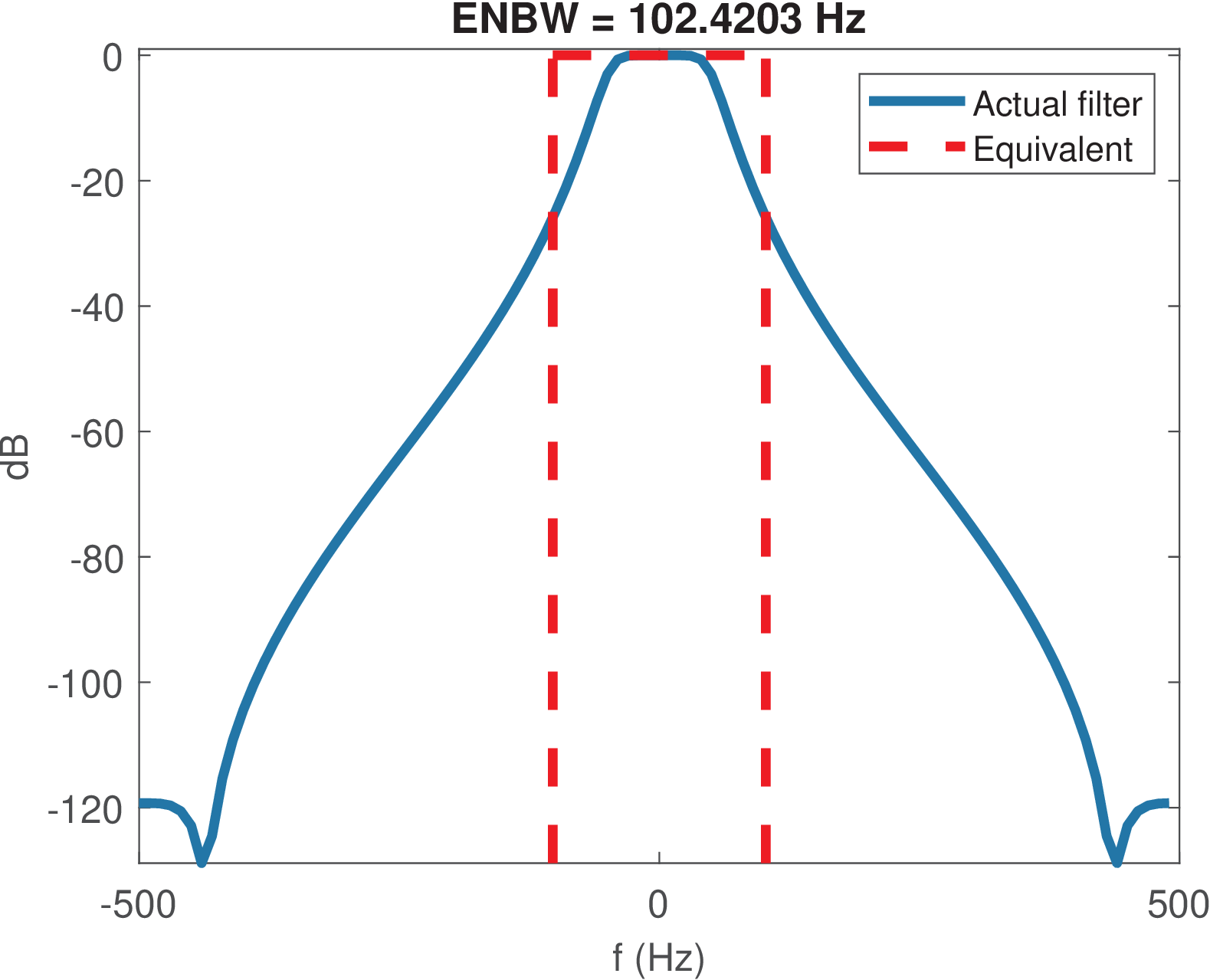
Observing Figure 3.23, due to the rectangular shape of ,
Hence, using Eq. (3.40) this can be written as:
|
| (3.41) |
which for real signals simplify to
|
| (3.42) |
Quality factor for filters
The Q-factor of a pole, as defined in Eq. (3.37), can be easily adapted to a system with a frequency response that allows obtaining its 3-dB bandwidth (see Figure 3.22) such as a bandpass filter.10 In this case, the pole natural frequency in Eq. (3.37) is substituted by the filter’s center frequency such that
|
| (3.43) |
The inverse of , i. e., is called fractional bandwidth and often specified in percentage.