3.6 Advanced: First and Second-Order Analog Systems
Because they are basic building blocks for higher-order filters, first and second-order continuous-time (also called analog) systems are discussed in the sequel.
3.6.1 First-order systems
If the coefficients are real, a first-order system , (as the one whose frequency response is depicted in Figure 3.8) is restricted to have a lowpass frequency response. This has a pole at and a zero at . Using leads to a unitary gain at DC. Placing a zero at leads to , which has a highpass response.
A system with ROC given by has an inverse Laplace transform , which can be written as where is the well-known time constant [ url3mit] of the system’s impulse response. After an interval of one time constant, the impulse response has decayed to 36.8% of its initial value.
If the ROC of includes , the frequency response in this case is . As illustrated by Eq. (3.34), the magnitude at is then , which is the cutoff frequency because it corresponds to a decrease of 3 dB in power.
3.6.2 Second-order systems
The system function of a second-order system (SOS), also called a two-pole resonator, has a denominator that can be written as . When there are two zeros at and the gain at DC is unitary (), the SOS is:
|
| (3.27) |
where is the natural frequency and the decay rate parameter, which is useful for defining the damping ratio . Hence, Eq. (3.27) can be rewritten as:
|
| (3.28) |
The values of , and can be related to several characteristics of a SOS. For example, represents the rate of exponential decay of oscillations when the system input is a unit step . And depending on , three categories of second-order systems are defined:
- : critically damped SOS, with a double real pole at ;
- : overdamped SOS, with real poles at ;
- : underdamped SOS, with complex conjugate poles.
Note that these three categories depend only on the denominator of .
The numerator of represents another degree of freedom. Changing this numerator, leads to distinct SOS. An alternative to Eq. (3.27) (or, equivalently, Eq. (3.28)) is
|
| (3.29) |
which has a zero at the origin (). Yet, other two options of SOS can be defined as
|
| (3.30) |
and
|
| (3.31) |
Table 3.3 summarizes these options for the numerator of a SOS.
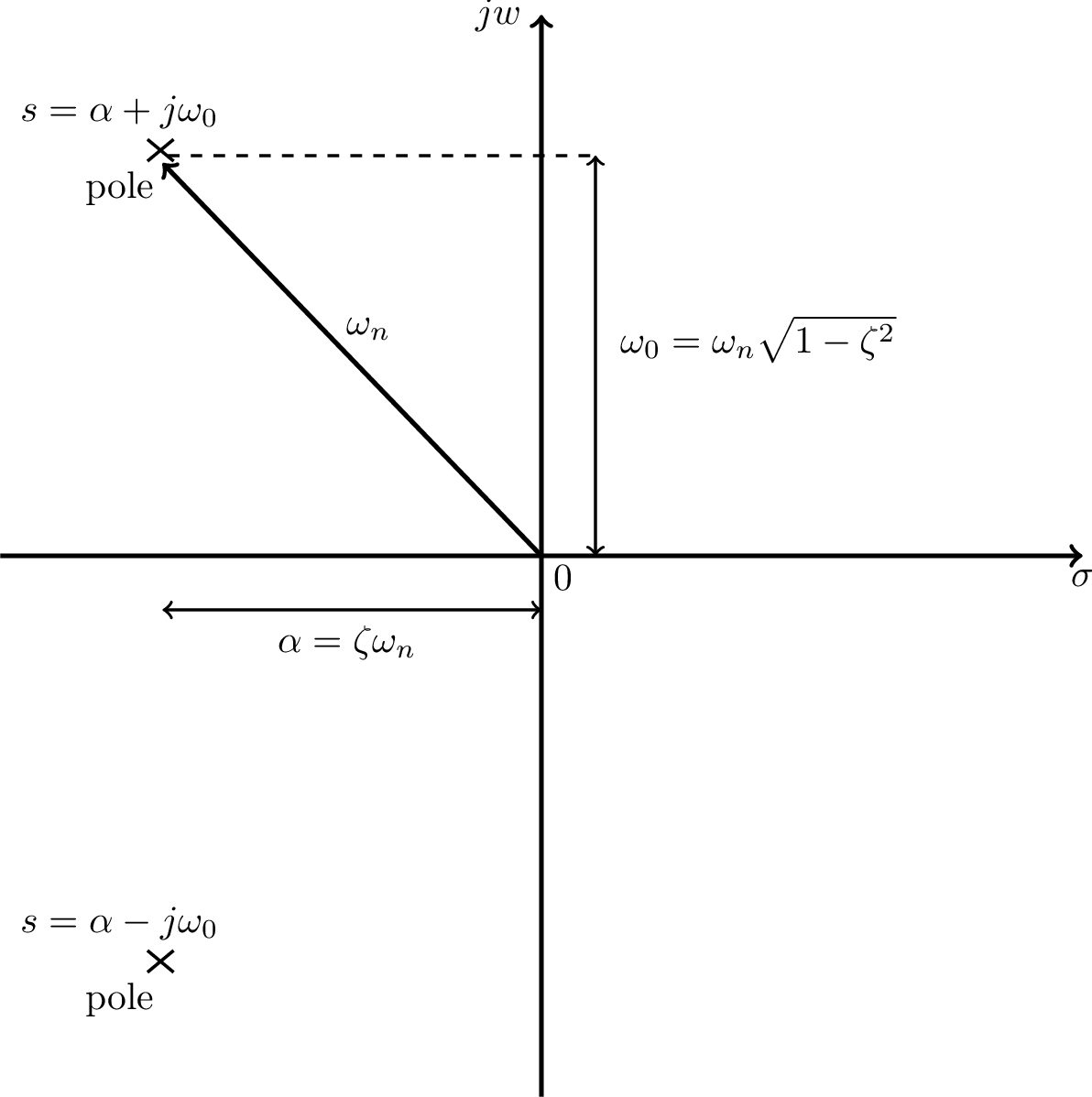
Using the quadratic formula to find the roots of a SOS, the poles are , which can be rewritten as . Figure 3.19 summarizes these relations. Note that and, unless (poles on the axis), the natural frequency is different from the center frequency of the pole .
Note that for a first-order system with real-valued coefficient , the pole is real, its center frequency is , and the natural and cutoff frequencies coincide. For a second-order system, the expression for the cutoff frequency is more elaborated. Considering Eq. (3.27), the cutoff is
|
| (3.32) |
which can be found by using . In this case, when .
Example 3.7. On the damping ratio of a SOS. Figure 3.20 illustrates the influence of the damping ratio using the values and 2.
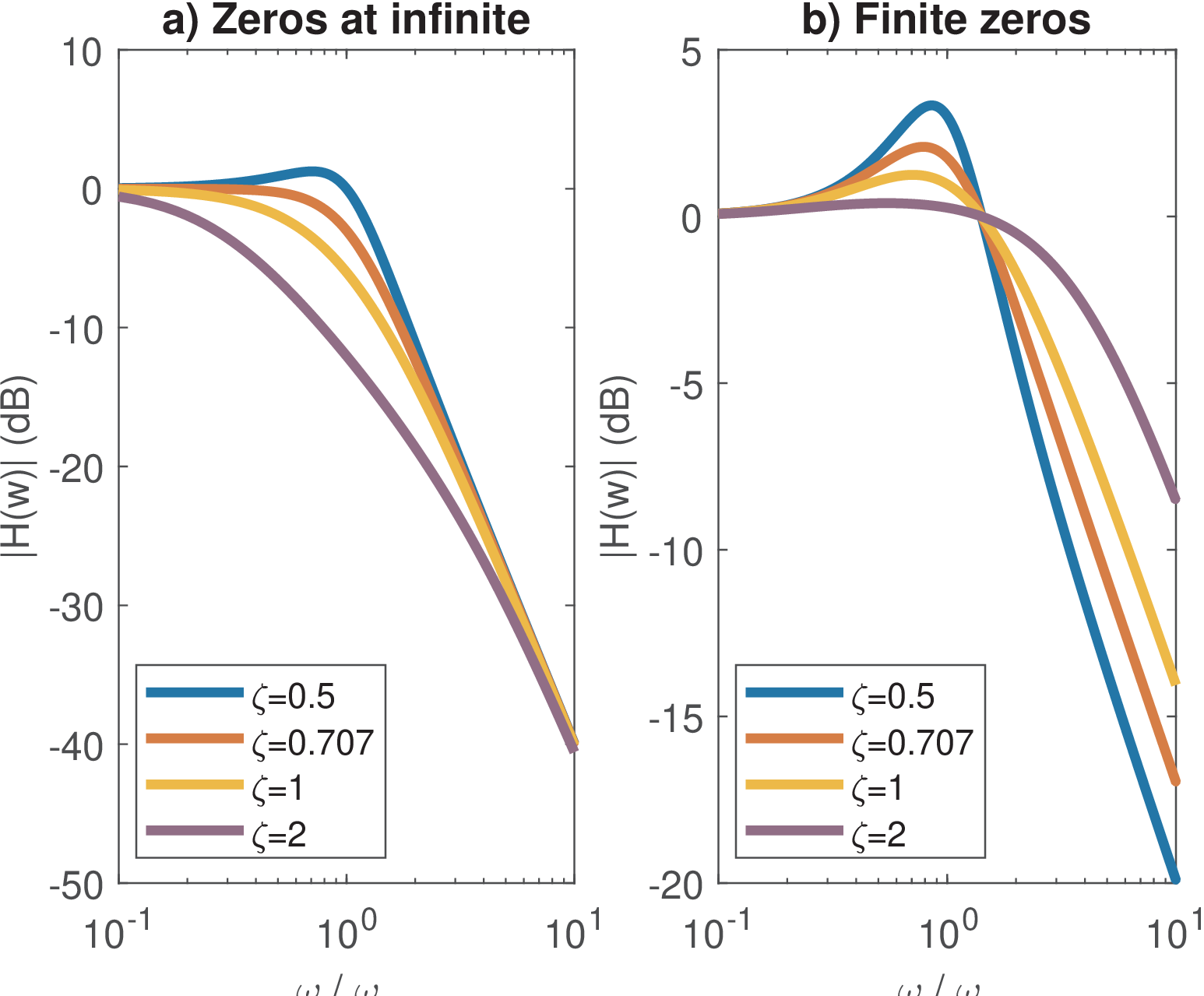
Figure 3.20 also compares Eq. (3.28) and Eq. (3.31), which are two of the options contrasted in Table 3.3.
Figure 3.21 illustrates some key time-domain performance parameters for an underdamped system obtained when the input is a step function. The rise time is the interval for the step response to rise from 10 to 90% of its final value. The settling time is the interval to have the output within a given range, which is 5% in Figure 3.21. The overshoot is the peak amplitude and occurs at the peak time .
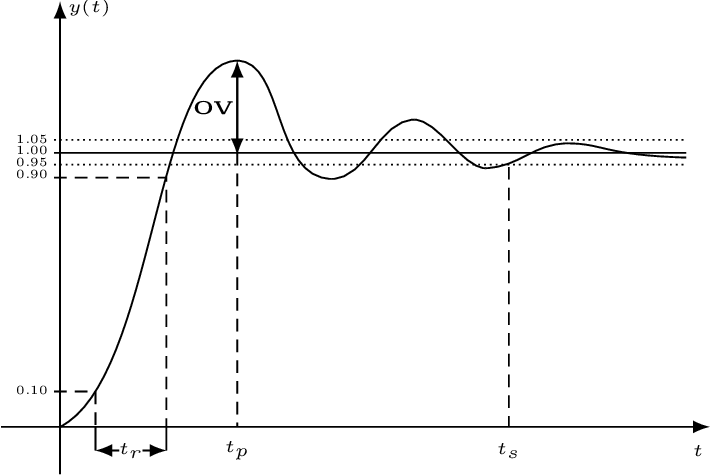
Table 3.4 summarizes some parameters for the system described by Eq. (3.28), which can be found8 from the inverse Laplace transform of given that is the transform of . The tolerance is used to obtain and a typical value is .
| Performance parameter | Expression | For |
| Peak time | ||
| Rise time | ||
| Settling time | ||
| Overshoot | ov=4.32% | |
| 3-dB bandwidth (rad/s) | ||
Table 3.4 indicates that, for an underdamped system, the rise time when is . As expected, all three time parameters are inversely proportional to the natural frequency .
Listing 3.8 indicates the commands to calculate the parameters, emphasizing the factors that depend on (zeta) only.
1zeta=0.5 %damping ratio, e.g. sqrt(2)/2 = 0.707; 2wn=2 %natural frequency in rad/s 3epsilon=0.05 %tolerance for the settling time (5% in this case) 4tp_factor=pi/sqrt(1-zeta^2) %depends on zeta only 5tp=tp_factor/wn %peak time 6tr_factor=(2.23*zeta^2 - 0.078*zeta + 1.12)/sqrt(1-zeta^2) %zeta only 7tr=tr_factor/wn %rise time 8ts_factor= -log(epsilon * sqrt(1-zeta^2))/(zeta) %zeta only 9ts=ts_factor/wn %settling time 10ov=exp(-(zeta*pi)/sqrt(1-zeta^2)) %overshoot (depends on zeta only) 11bw_factor=sqrt(1-2*zeta^2 + sqrt(2 - 4*zeta^2 + 4*zeta^4)) %zeta only 12wc=wn*bw_factor %cutoff frequency=3-dB bandwidth (in radians/second) 13%% Check whether the cuttoff frequency wc corresponds to a -3 dB gain 14s = 1j*wc %define s = j wc 15Hs = (wn^2) / (s^2 + 2*zeta*wn*s + (wn^2)) % system function 16gain_at_wc = 20*log10(abs(Hs)) %answer is -3.0103 dB
Matlab has the stepinfo function, which can be used to obtain most of the parameters in Table 3.4 as follows:
1zeta=0.5 %damping ratio, e.g. sqrt(2)/2 = 0.707; 2wn=2 %natural frequency in rad/s 3sys = tf([wn^2],[1 2*zeta*wn wn^2]); %define the transfer function 4S=stepinfo(sys,'RiseTimeLimits',[0.1,0.9], ... 5 'SettlingTimeThreshold',0.05) %get parameters with stepinfo 6step(sys) %plot step response to check results if want
The system bandwidth will be discussed in the next section. Table 3.4 informs that, when , the 3-dB bandwidth in radians per second of the SOS given by Eq. (3.28) is simply its natural frequency . In fact, as varies from 0.5 to 0.8, which are the values typically used, its varies from to . This justifies using as a rough approximation of bandwidth for Eq. (3.28).