2.9 Z Transform
The Z transform is the counterpart of the Laplace transform for discrete-time signals. The pair of equations is given by
|
| (2.58) |
where is a counterclockwise closed path encircling the origin and entirely in the region of convergence (ROC). The contour (or path) must encircle all of the poles of .
2.9.1 Some pairs and properties of the Z-transform
The Web has several tables of properties and pairs related to the Z transform.15 Some important results are highlighted in the next paragraphs.
Z transform of the discrete-time impulse
A very useful Z transform pair is
- .
Time-shifting property
An important Z transform property is
- .
Z transform of several impulses
Putting together the Z transform of and the time-shifting property leads to
- .
With this result, and using linearity one can write, e. g.,
Initial value theorem
Another interesting result is the initial value theorem, which is valid for signals for which for (right-sided) and states that
Using this theorem, one can anticipate that when has a denominator with degree larger than the numerator, such as in given in Example 2.23.
Relation of Z transform and geometric series
In cases is left-sided or right-sided, can be written as a geometric series and Eq. (A.17) used to obtain . For example, the Z transform of is obtained as follows:
Using Eq. (A.17) with a scale factor , ratio and leads to
|
| (2.59) |
2.9.2 Region of convergence for a Z transform
Similar to the Laplace transform, the values of for which the transform exists are called the region of convergence (ROC). The ROC of Z transforms are annular regions of the form (for right-sided sequences, also called causal), (for left-sided sequences) or (for two-sided sequences), where . When the signal in time-domain has a finite support (duration), the ROC of the associated Z transform is the whole -plane, eventually with the exceptions of and .
To recover from its transform , it is essential to know the ROC. For example, the Z transform of is:
In order to use Eq. (A.17) with factor and ratio one can modify the summation interval
with the ROC (because Eq. (A.17) requires ). In summary, both (see Eq. (2.59)) and have and only the ROC can disambiguate them when calculating the inverse Z transform.
2.9.3 Inverse Z transform of rational functions via partial fractions
In general, the inverse Z transform is calculated using Eq. (2.58). But similar to the methodology described for the Laplace transform in Section 2.8.5, for the important category of Z transforms that are ratios of two polynomials, one can use partial fraction expansion (see Appendix A.8) to conveniently calculate the inverse .
The inverse Z transform of rational functions can be obtained by different methods. The procedure adopted in this text is the following:
- f 1.
- make the rational function to have only non-negative16 powers of ,
- f 2.
- find the poles and expand in partial fractions as discussed in Section A.8, paying attention to start with a strictly proper rational function17 or use long division until getting one,
- f 3.
- convert each parcel of to the time domain,
- f 4.
- rearrange the terms, especially the ones corresponding to complex conjugate poles.
Example 2.23. Z transform of a strictly proper rational function . Find the inverse of , knowing that is right-sided (or, equivalently, that the ROC is ). In this case, partial fractions expansion leads to
which can be rewritten as
to facilitate using the pair , for , together with the property . Hence, the result is
|
| (2.60) |
and one can note that for , .
Different approaches to obtain can lead to distinct expressions, but these expressions must correspond to the same values of . For example, some people prefer to start by obtaining the partial fraction expansion of instead of . The following example illustrates the equivalence of both procedures.
Example 2.24. Expanding instead of . Instead of performing expansion of , an alternative procedure is to expand . For given in Example 2.23:
After the expansion, both sides of the expression can be conveniently multiplied by to obtain at the left side of the equality and parcels in the form at the right side:
This leads to the inverse
|
| (2.61) |
This expression seems different than Eq. (2.60). However, a closer inspection indicates that, for both expressions, the sample values , etc., are the same, i. e., the procedures led to the same signal, as expected.
Example 2.25. Z transform when the rational function is not strictly proper. Use partial fractions expansion to obtain the inverse transform of
using positive powers of . Given that the denominator degree must be strictly larger than the numerator’s, long polynomial division is adopted:
The two fractions in the form can be written as , such that the inverse is
|
| (2.62) |
Another valid expression for , which can be obtained by working with using negative powers of is
|
| (2.63) |
As mentioned before, it may be confusing that Eqs. (2.63) and (2.62) seem different, which is often the case when working with negative or positive powers of . But they are equivalent and the values of are the same for all .
When the coefficients of the rational function are real, the poles and the corresponding residues occur in complex conjugates. The following example indicates a useful result.
Example 2.26. Simplifying the partial fractions corresponding to complex conjugates. Note that a pair of complex conjugate poles has complex conjugate residues. Let and be the residues for poles and , respectively, both with multiplicity one. With a ROC corresponding to right-sided signals, the two terms and in the partial fraction expansion can be rearranged in time domain to compose the general expression
|
| (2.64) |
If the ROC corresponds to left-sided signals, the same terms correspond to
|
| (2.65) |
For example, assuming a right-sided signal with
The complex conjugate poles and correspond to the complex conjugate residues and , respectively. The corresponding terms in the partial fraction expansion are
For a ROC corresponding to a right-sided signal, the inverse is
Substituting the values leads to
Rearranging:
which illustrates the general expression in Eq. (2.64).
Example 2.27. Example with complex conjugate poles. For example, to obtain the inverse transform of
with ROC , one can multiply numerator and denominator by and obtain their roots:
The partial fraction expansion is
Multiplying both sides by leads to
which can be rewritten by converting the complex numbers from Cartesian to polar form
Because in this case the ROC is for a right-sided sequence, each term corresponds to and the time domain signal is
which leads to
which is a result that can be obtained with Eq. (2.64).
2.9.4 Relation between Laplace and Z transforms
The Laplace and Z transforms are related. When the Laplace transform is performed on a sampled signal and a S/DT conversion block is used, the result is the Z transform18 of a discrete-time sequence where
|
| (2.66) |
and is the sampling period.
Eq. (2.66) is used in the matched Z-transform method for converting in into in , and is further discussed in Section 3.7.3.
Example 2.28. Converting to discrete-time and finding the corresponding Z-transform. As in Example 3.24, assume a continuous-time signal should be transformed to a discrete-time with a sampling period , and then have its Z-transform calculated. From Eq. (3.47):
|
| (2.67) |
where the last step used Eq. (2.59).
2.9.5 Advanced: Z transform basis functions
The basis functions of the Z transform are , . The complex-value could be written in Cartesian coordinates but it is more convenient to write it in polar coordinates, as . Taking in account the discrete-time , a Z basis function can be written as
Similar to the Laplace basis function , which has and , the Z basis function is also controlled by two parameters: and . As in the Laplace transform, the value of imposes the envelope of the Z basis function while (similar to ) controls the rate of its oscillation (see Figure 2.20).
The similarity of Laplace and Z basis functions can be made more explicit by writing
where . Comparing the Laplace basis function with the Z basis function , it is clear that they describe the same category of signals, but in continuous-time and discrete-time, respectively.
But the region of convergence of a Laplace transform depends on , so it is convenient to write the complex value in Cartesian coordinates, to make explicit. On the other hand, the region of convergence of a Z transform is determined by the magnitude of a value, which makes more convenient to write the complex value in polar coordinates, making explicit.
Example of 3D graphs representing a Z transform
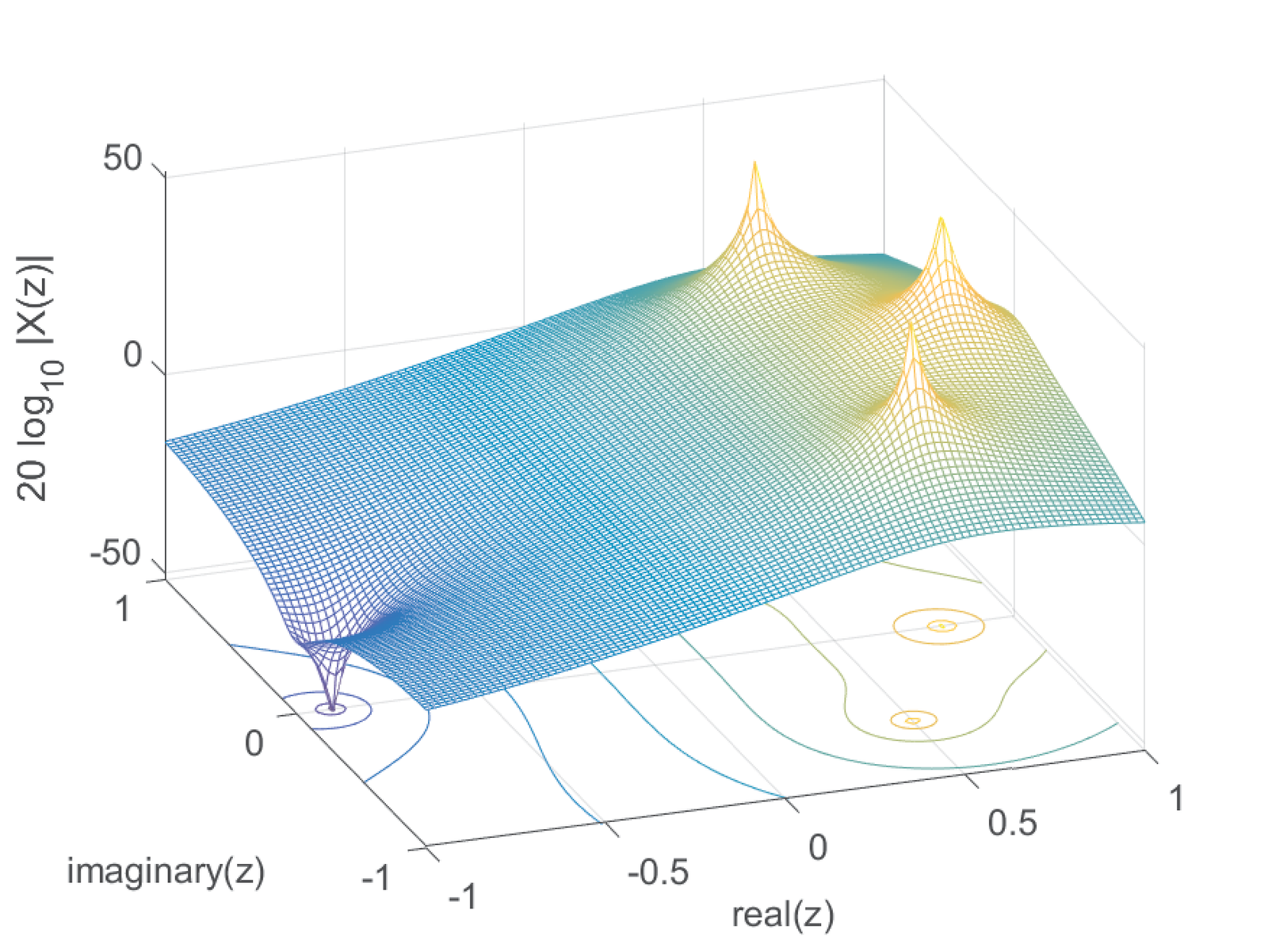
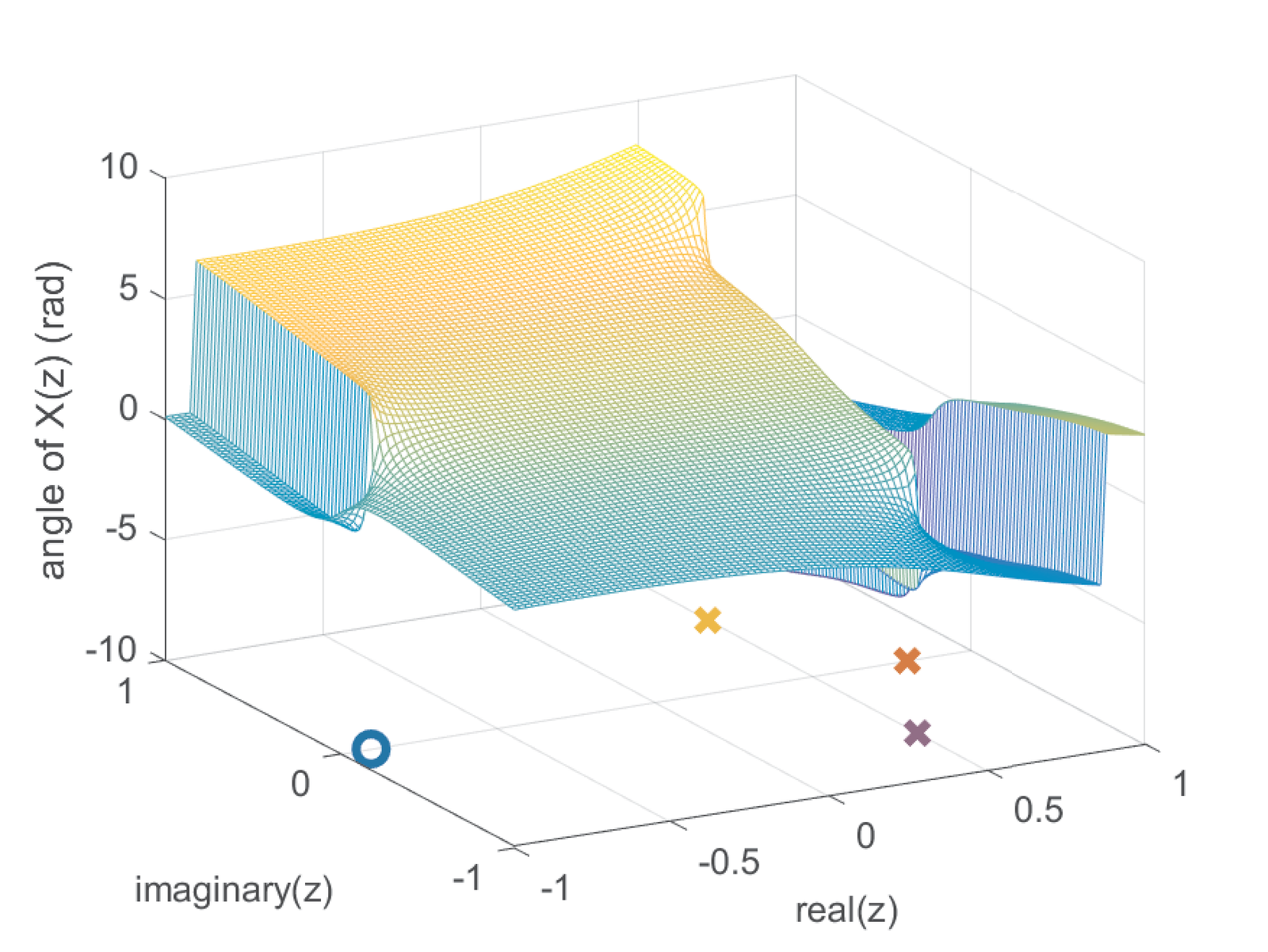
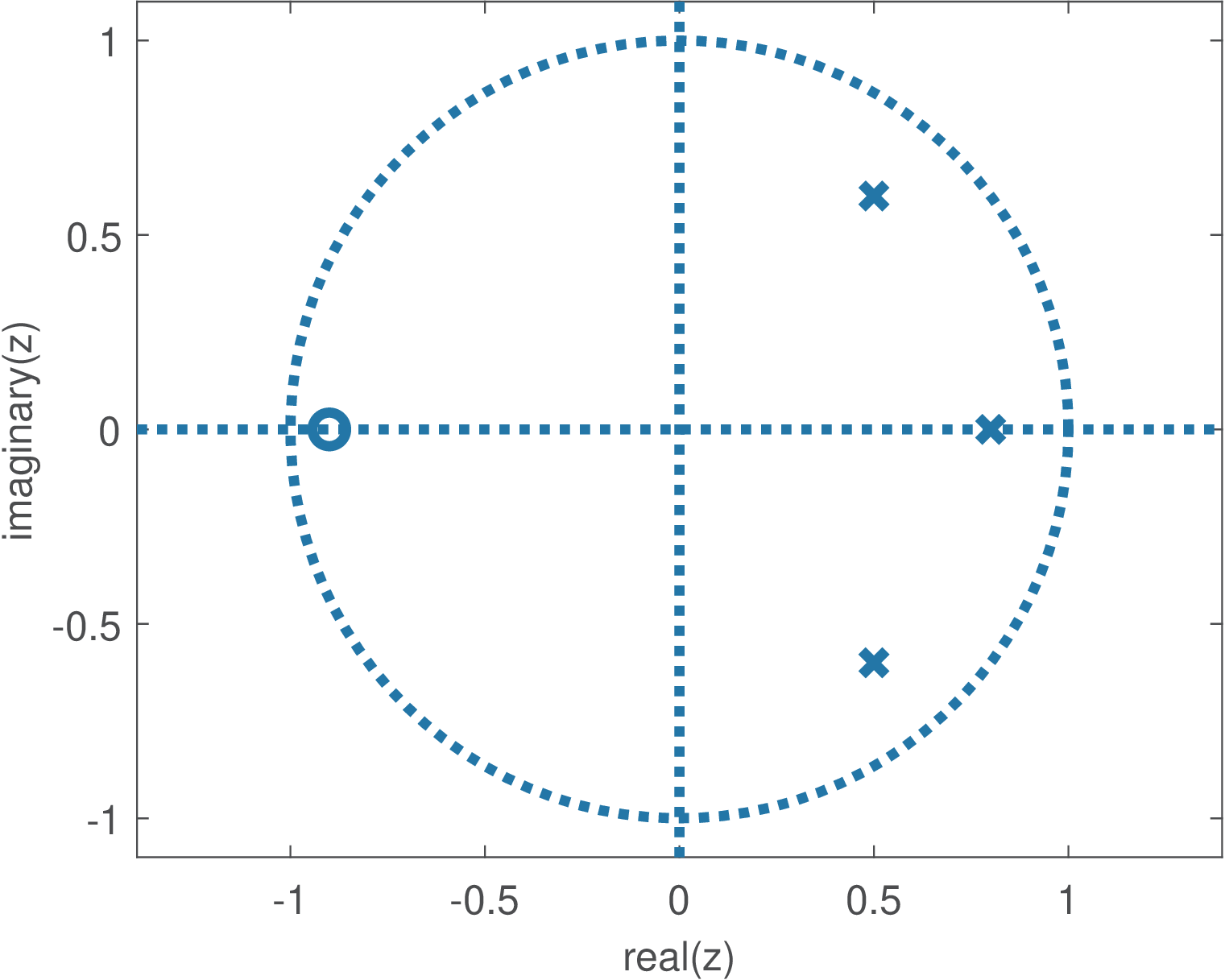
Similar to Figure 2.22 and Figure 2.23, which are for Laplace, Figure 2.27 and Figure 2.28 depicts the magnitude and phase, respectively, for
|
| (2.68) |
which has one finite zero and three poles as indicated in Figure 2.29.
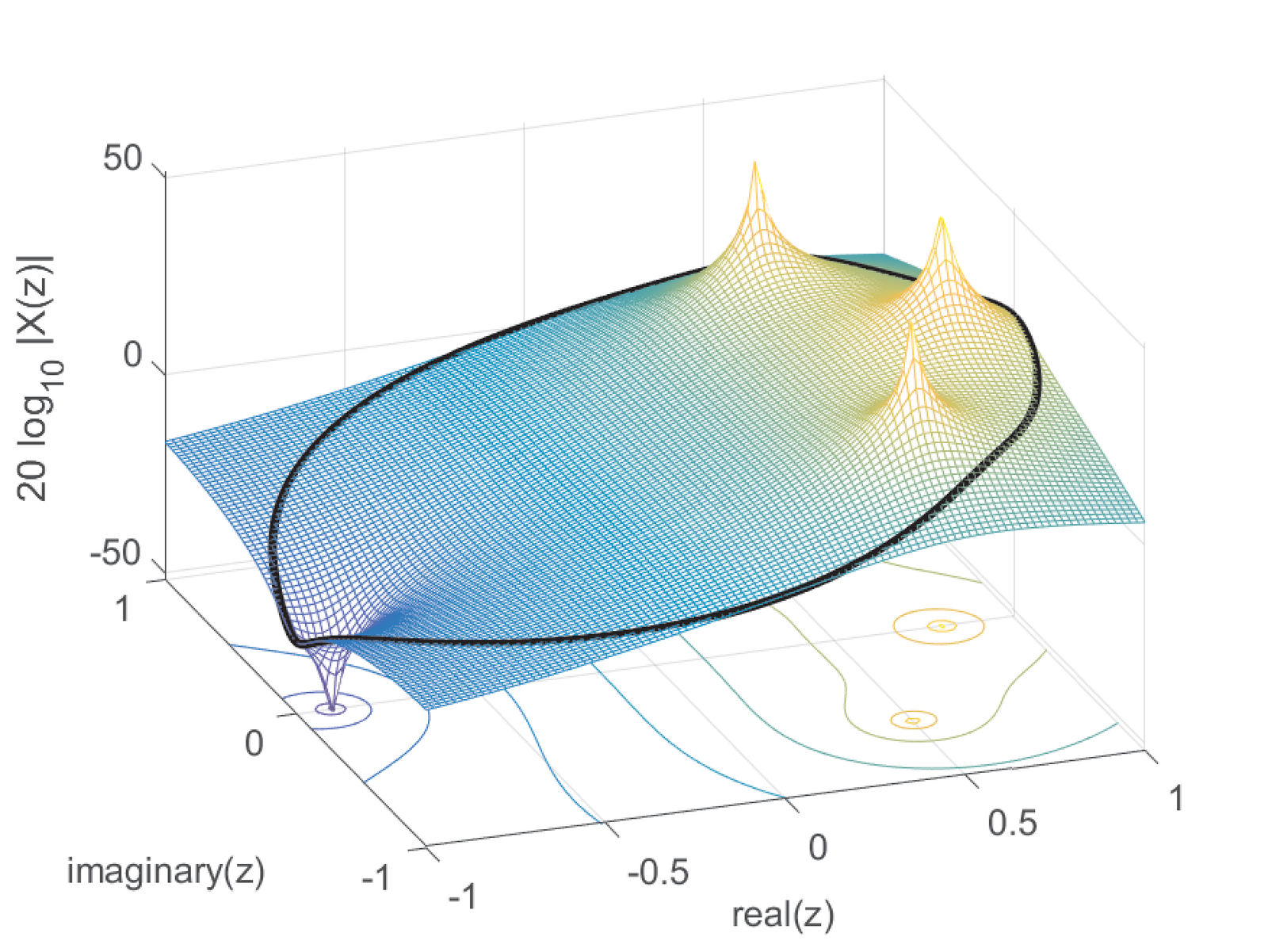
2.9.6 Calculating the DTFT from a Z transform
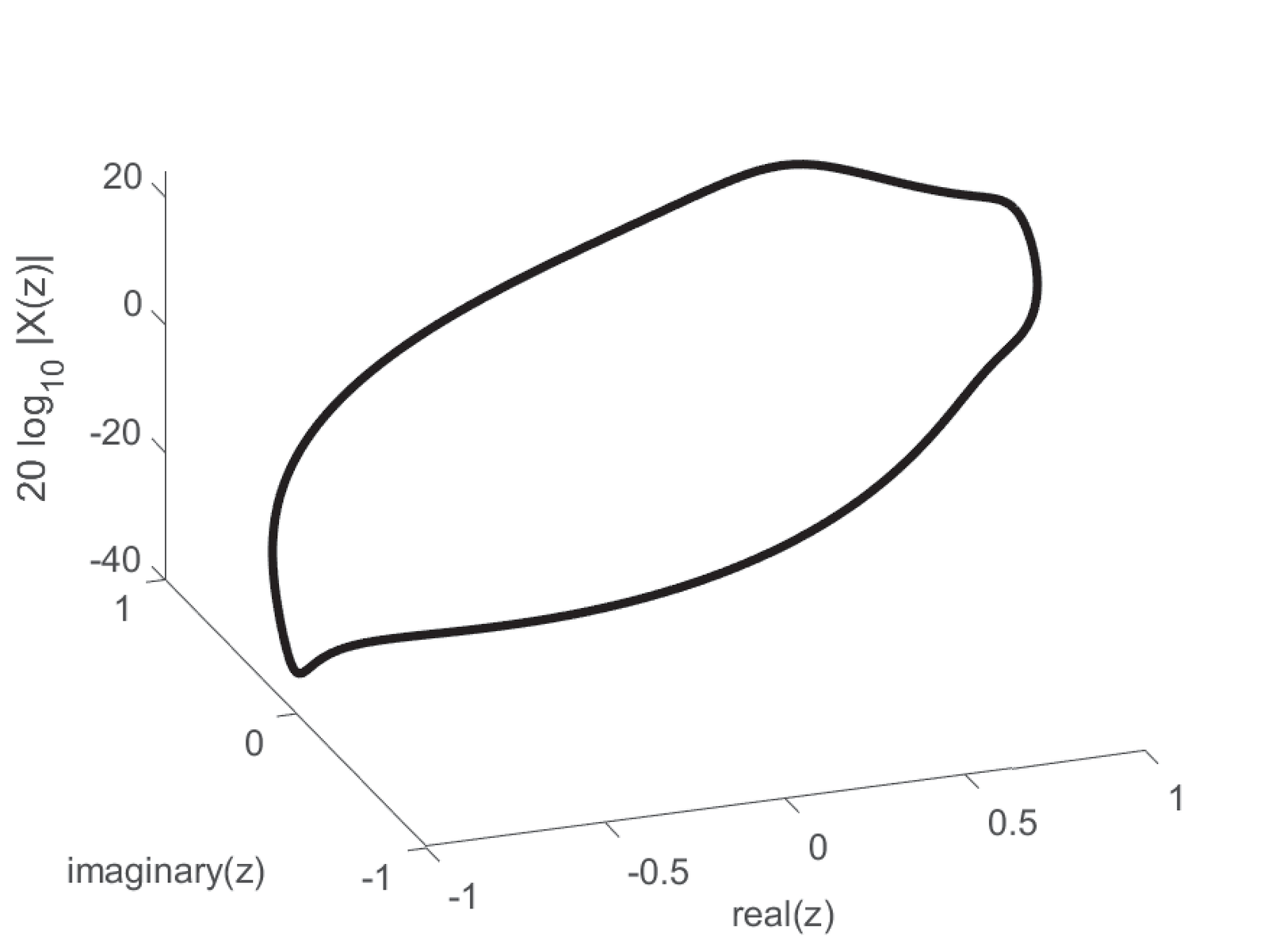
The relation between the Z transform and the DTFT is similar to the one between Laplace and Fourier transforms discussed in Section 2.8.6. Figure 2.30 and Figure 2.31 provide an example using Eq. (2.68).
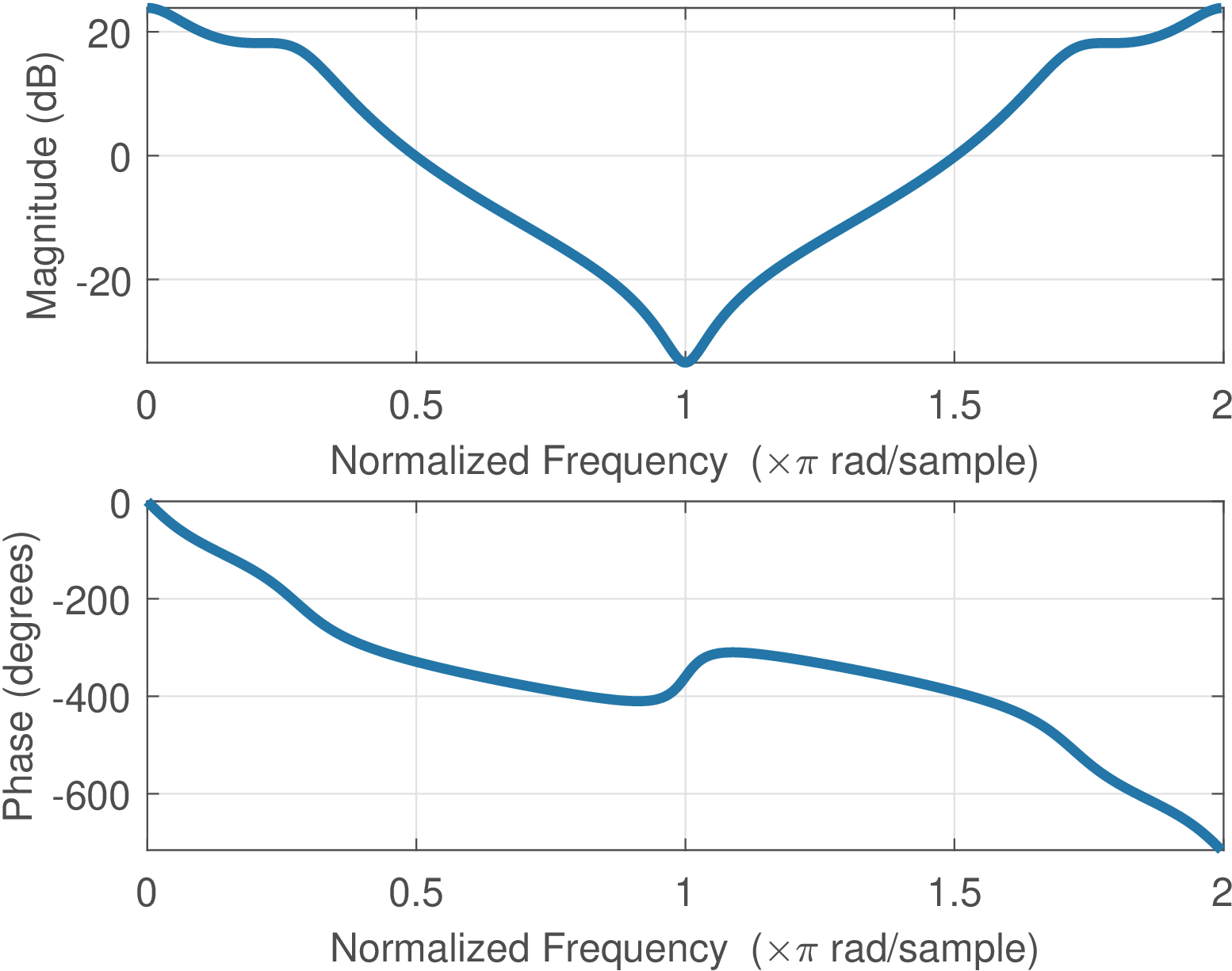
Sometimes it is not convenient to deal with 3-d plots such as Figure 2.31. An alternative is to represent the DTFT using a figure similar to Figure 2.32, which shows the magnitude and phase with the angle as independent variable. As discussed in Section 1.8.4, for convenience, the abscissa is normalized by , such that “1” corresponds to rad. Due to the symmetry of when is real, it is also common to represent the abscissa in the range (instead of as in Figure 2.32).