1.5 Advanced: Complex-Valued and Sampled Signals
Some signals are useful for developing theoretical models, even if they do not exist in practice. This section describes two important mathematical representations for signals.
1.5.1 Complex-valued signals
The definition of a signal (or ) can be expanded to include complex-valued amplitudes . In several situations, it is mathematically convenient to use a single complex-valued signal to represent two (typically related) real-valued (or simply real) signals. For instance, the complex-valued exponential (see Euler’s Eq. (A.1)) plays important role in Fourier analysis and simplifies the notation that, otherwise, would rely on two signals: and .
A complex-valued signal can be interpreted as representing two distinct signals, corresponding to the real and imaginary components. This representation is widely used in digital communications to compose quadrature signals. In quadrature processing, the component is called in-phase and denoted as while is called the quadrature component and denoted as . The quadrature signal is real-valued and can be obtained via
|
| (1.12) |
where is a carrier frequency in radians per second. The name quadrature comes from the fact that the sine is a cosine delayed by 90 degrees.
An alternative way of implementing Eq. (1.12) is by defining the complex-valued signal and using the compact notation
|
| (1.13) |
where denotes the real part of a complex-valued signal.
Later (for instance, after transmitting the quadrature signal through a communication channel), the components and can be recovered from . The systems that recover these components typically use quadrature sampling, in which two ADCs deal with the two components and that may be interpreted as composing a complex-valued signal .
Note that the notation is also used for quantized continuous-time signals in Section 1.2, but the context will disambiguate these two categories of signals.
1.5.2 Sampled signals
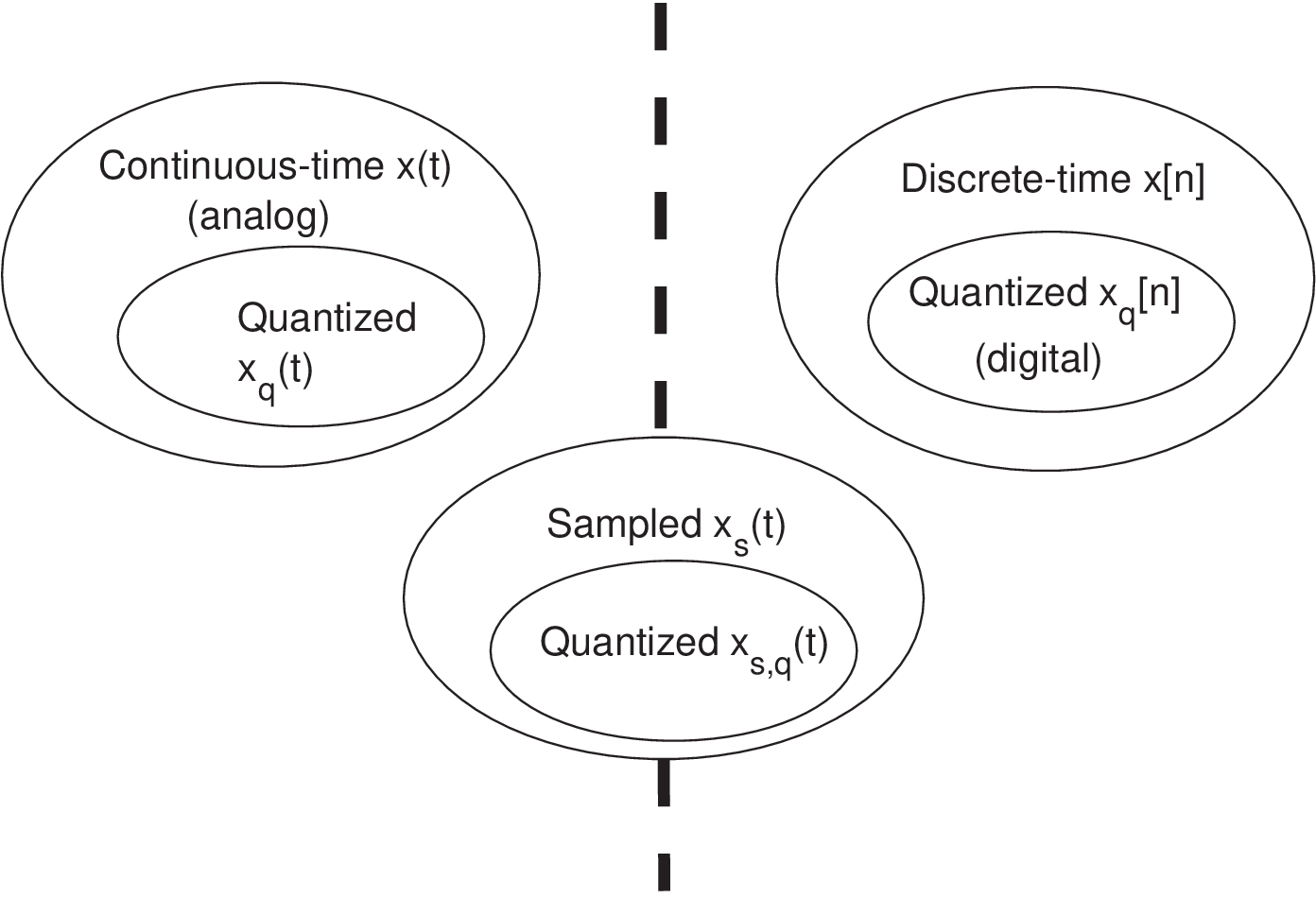
In a sampled signal , the information is represented by uniformly spaced impulses with distinct areas. Because the impulses have undefined (infinite) amplitude values, will not be considered here a continuous-time signal, but an intermediate representation between the continuous and discrete-time worlds as indicated in Figure 1.20. Signals other than impulses (e. g., pulses) can be used for sampling, but an impulse train is the only option discussed here due to its mathematical convenience. Assuming impulses, the sampled signal is not physically realizable but it is very useful for mathematically modeling the sampling step of the A/D conversion, as will be discussed in the next paragraphs.
In this text, a sampled signal is assumed to be the result of periodic sampling a continuous-time signal . Hence, the sampled signal is composed by periodically spaced impulses whose areas correspond to the value of the original analog signal at the impulse location. There is a convention for showing plots of sampled signals with the impulse heights corresponding to their areas (see Appendix B.6), but the infinite amplitude of is considered at the impulses positions. The amplitude is zero if is not a multiple of , i. e., , where is any integer.8
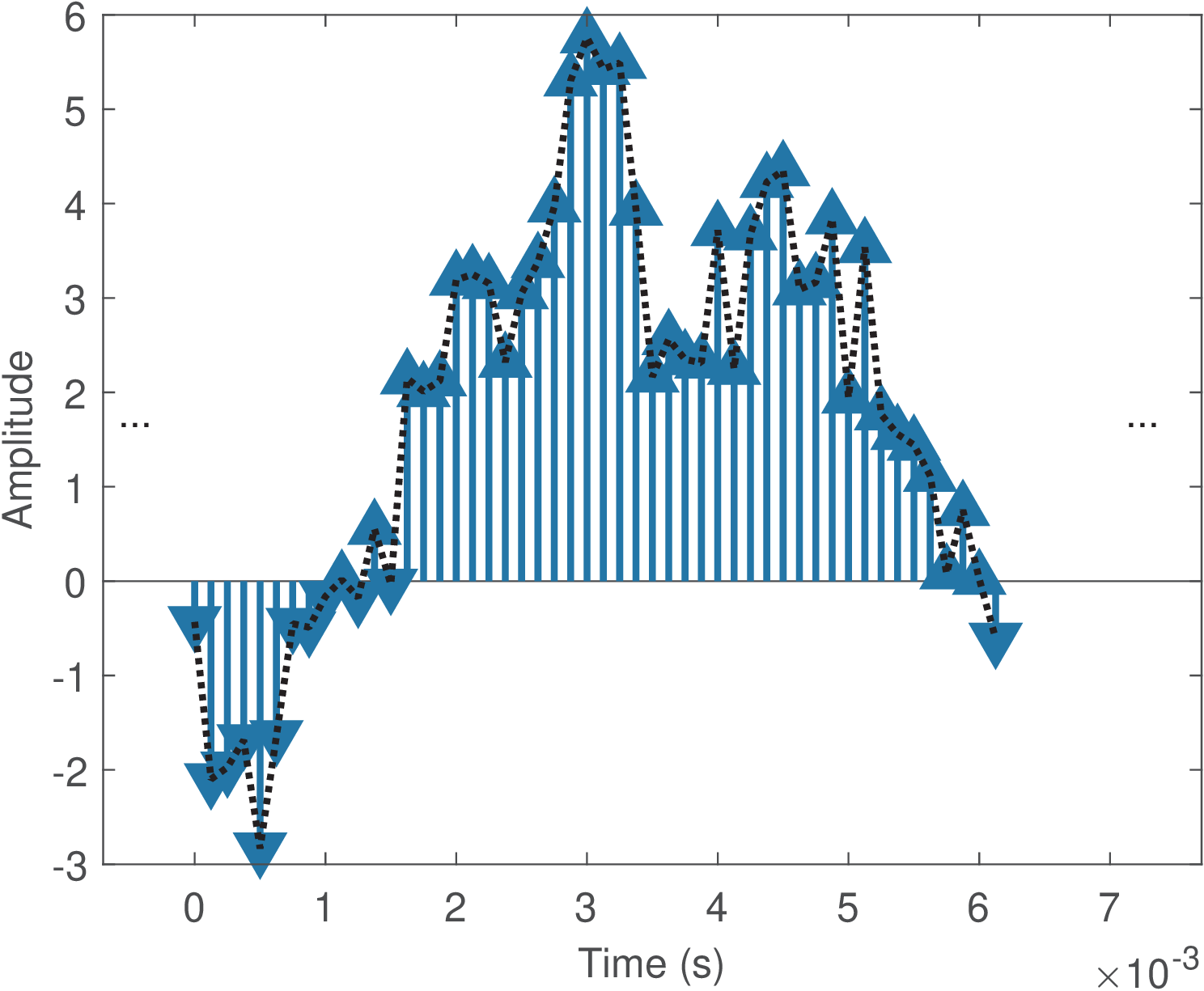
Figure 1.21 presents an example of a sampled signal. It can be compared with Figure 1.1 and Figure 1.2. Figure 1.21 was obtained assuming the time interval between consecutive impulses is s (or, equivalently, that kHz). Note also that the sampled signal in Figure 1.21 exists for all , while a discrete-time signal is considered to exist only for . Another distinction is that in (as well as in ) has dimension of time (assumed to be in seconds) while in is dimensionless.