3.5 Improved Notation to Deal with DT/S and S/DT Conversions
The next paragraphs provide more details about the notation adopted in DT/S and S/DT conversions. This will be useful to later studies in ths chapter, such as the design of digital filters.
3.5.1 Notation for signals and systems related to S/DT conversion
It is convenient to have two different notations for the S/DT conversion: a simpler one and an alternative that better represents cases in which the amplitude of depends on the sampling interval . We start this discussion with an example.
Example 3.23. Example of S/DT conversion of a signal . Assume the continuous-time signal should be sampled with a period to create , which is then transformed into a discrete-time signal via the S/DT operation. The notation will denote the S/DT process, which in this case leads to:
The last step in Eq. (3.47) is based on the fact that .
When writing signal expressions, the sampling operation is eventually not made explicit. An alternative notation is discussed in the following example.
Example 3.24. Simplified notation for the S/DT conversion of a signal . This example discusses a simplified notation for the S/DT conversion that is sometimes adopted in the literature.
Assume the continuous-time signal should be transformed to a discrete-time with a sampling period . This conversion is often denoted as:
|
| (3.48) |
which can be confusing. One could write and, comparing to Eq. (3.48), complain that the samples of the continuous-time step function became ( was “substituted” by ), while remained (was not substituted by ) in the exponential .
The reason to be careful with the simplified notation is that, when performing a S/DT conversion, the occurrences of as part of the independent variable (the argument of , within ) are converted to , as depicted in Figure 1.36. However, the factor remains when it influences the amplitude (dependent variable).
Hence, the notation for the S/DT process in Eq. (3.48) is somehow incomplete. It does not rely on impulses and, consequently, it does not make explicit the intermediate step of creating a sampled signal . However, because the notation is cumbersome, the reader should be also familiar with the widely adopted alternative of Eq. (3.48).
3.5.2 Notation for signals and systems related to DT/S conversion
When a discrete-time signal with DTFT is converted into a sampled signal with Fourier transform via a DT/S conversion, as discussed in Section 1.7.6, it has a frequency-domain description given by
|
| (3.49) |
In other words, the value of for a specific frequency rad/s is obtained from where rad, as dictated by Eq. (1.35).
The notation is such that the subscript in indicates the Fourier transform of a “sampled” signal or, alternatively, can be used. In both cases, the reader should have in mind that a sampled signal has a periodic spectrum.
Eq. (3.49) corresponds to scaling the abscissa of the DTFT , originally specified in rad, to create the Fourier Transform with an abscissa in rad/s. Figure 3.27 provides an example of the spectra involved in this DT/S conversion.
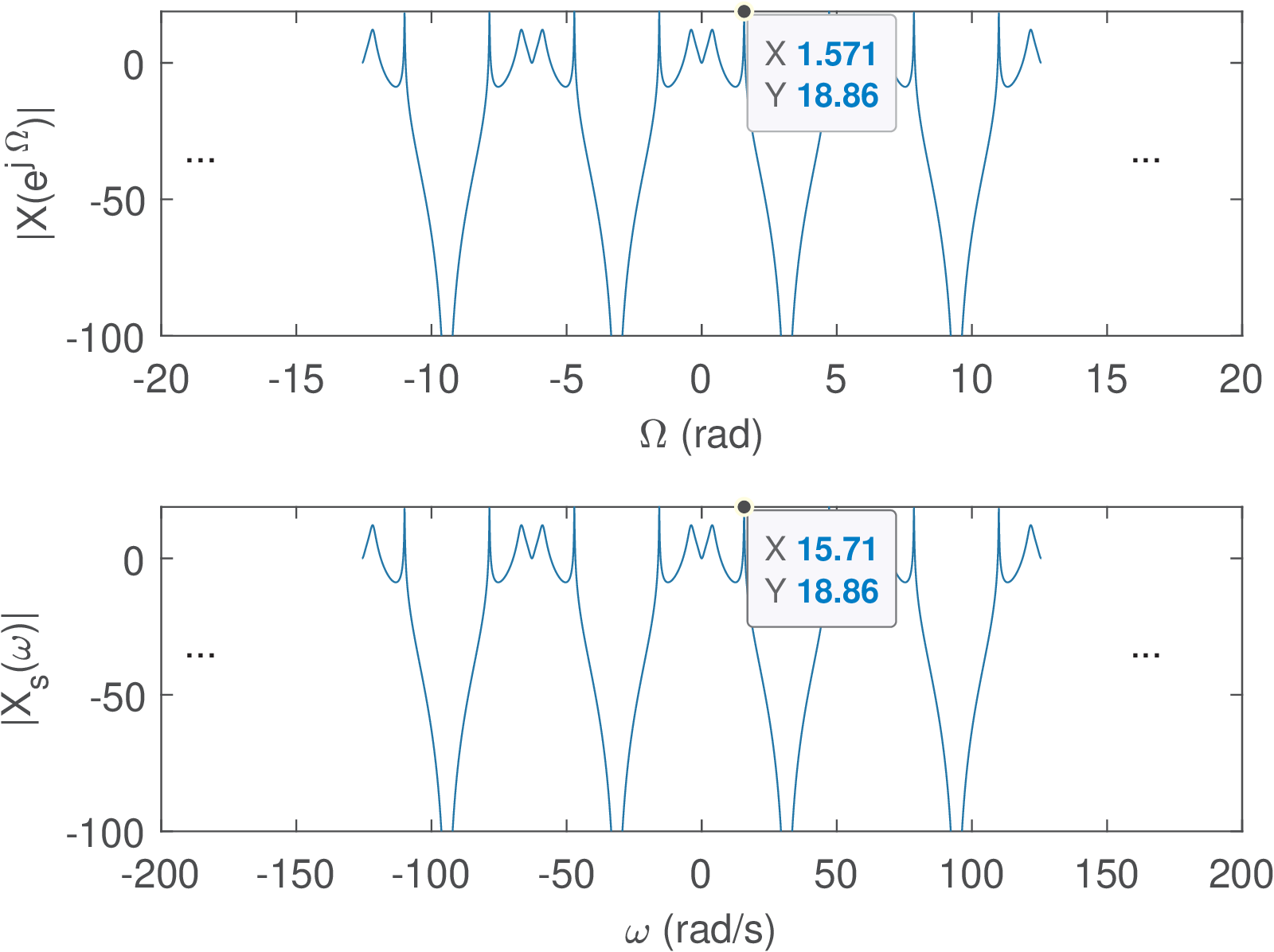
The datatips in Figure 3.27 highlight that the value at rad was converted to where rad/s.
The replicas that occur in the spectrum of a sampled signal are located in Nyquist zones, which are intervals of when the frequency is specified in Hertz. For example, the first Nyquist zone is , the second is and so on. When the frequencies and are specified in rad/s and rad, the bandwidths of the Nyquist zones are and , respectively.
In summary, inherits the periodicity of that corresponds to , but the notation does not indicate this periodicity. Therefore, in some situations, it is convenient to denote the spectrum of as , which indicates that this spectrum is periodic as proven by
given that .
Instead of using the angular frequency in rad/s, an alternative description of a spectrum with period is , using in Hz. This notation reminds that
which indicates this periodic spectrum has the same value at frequencies that are multiples of .
Notation for combined filtering and DT/S stages
Assume a digital signal processing pipeline such as the one in Figure 1.42, in which a system function (for instance, a digital filter) is implemented in the DSP block. The corresponding DTFT of is . The roles of these two stages:
can be combined into one “analog” filter with frequency response . This can be interpreted as a simple abscissa scaling in graphs such as Figure 3.27. Another view is that, while Eq. (3.49) refers to a signal (a sampled signal in this case), the corresponding version of a DT/S process applied to a system (an analog system in this case) is
|
| (3.50) |
In some cases, such as IIR filter design discussed in Section 3.7, it is useful to adopt subindices and to avoid confusion and disambiguate and within a signal processing pipeline. In this case, the previous equation is written as
|
| (3.51) |
which is similar to the simplified notation described in Example 3.24 for S/DT processes when using time-domain equations.