2.14 Applications
Application 2.1. Signal regeneration: Analog versus digital communications This application illustrates the idea of signal regeneration in digital communication systems. Assume the information is conveyed by the signal amplitude. Because a finite set of amplitudes is used by the transmitter, small variations on the received signal amplitudes can be identified and corrected. Assume an original digital signal , with , is contaminated by additive noise , and a new signal is created. This noise contamination can happen when transmitting a signal in telecommunication or copying a CD, for example. If the magnitude is not too large (in this case, ), it is possible to successfully recover by approximating the samples of to the nearest value in .
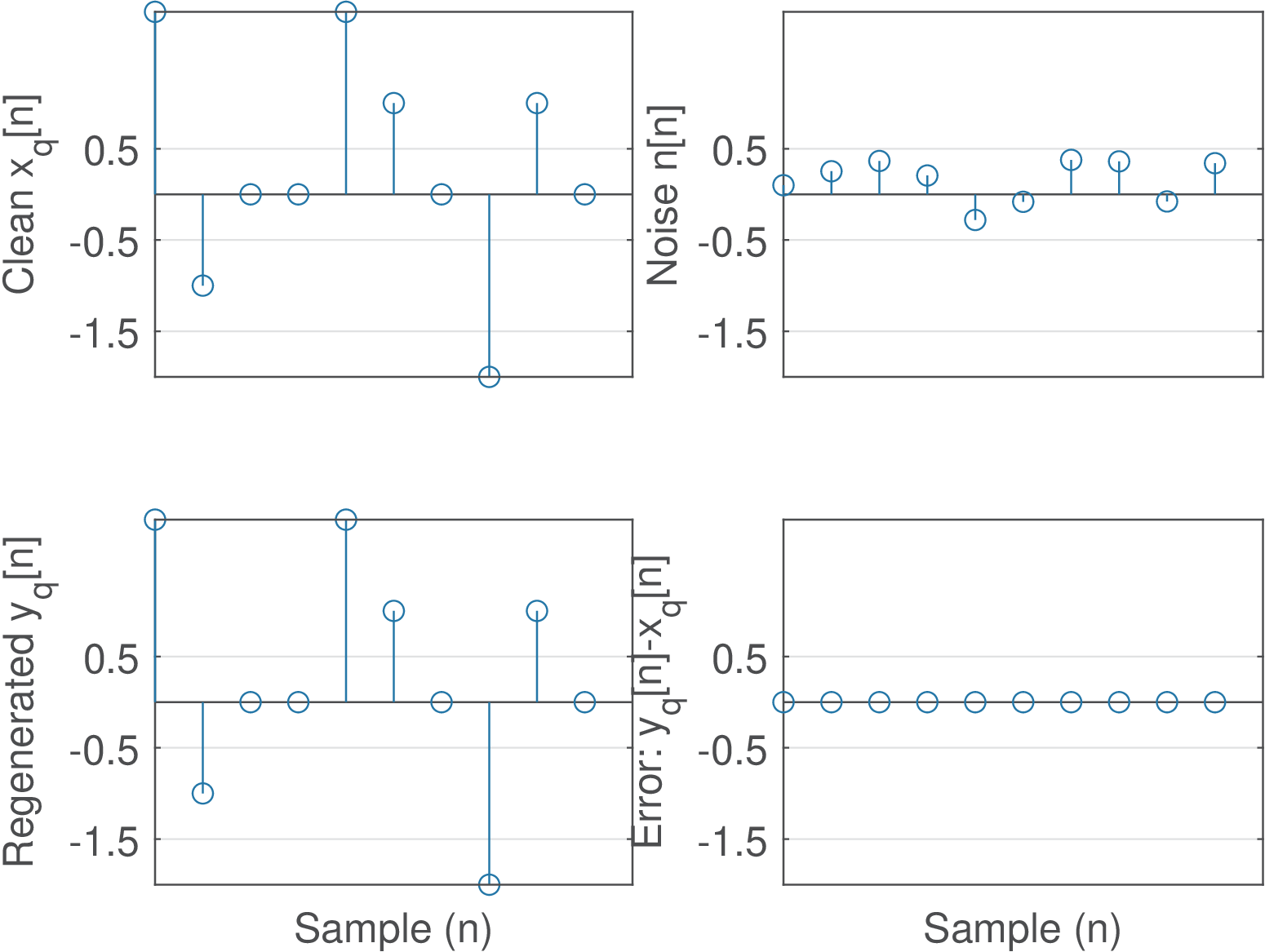
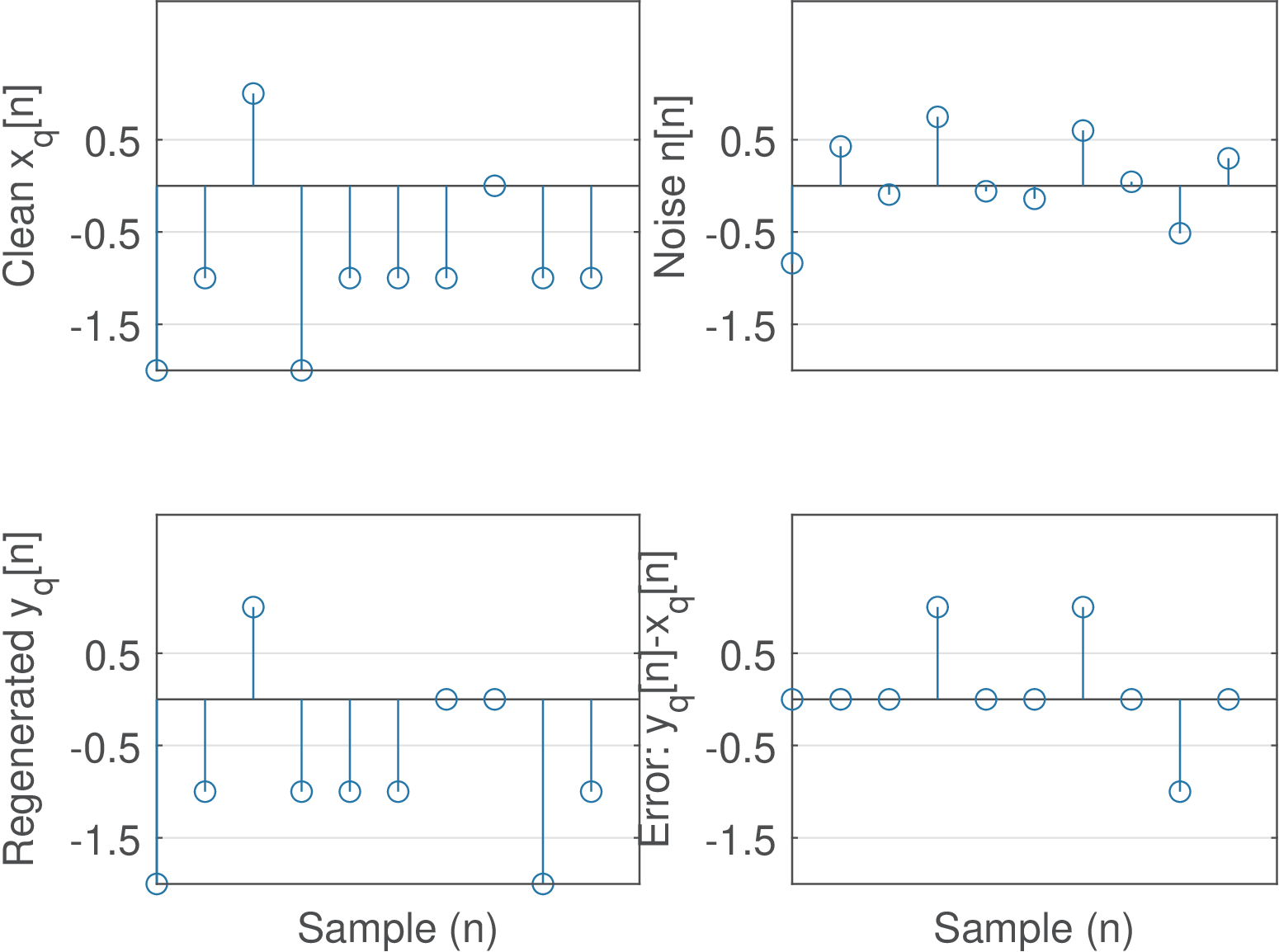
Figure 2.28 depicts samples of these signals in the case that the signal-to-noise ratio (SNR) is 3 decibels (dB), i. e., the power of is approximately twice the power of (see Appendix A.26 for an explanation about the decibel). In this case, was recovered without errors. To complement the example, Figure 2.29 was generated at similar conditions but with SNR dB. Note for but could be recovered because was negative and is the nearest value for all received amplitudes larger than . Hence, three errors were created in the process.
Application 2.2. Packing the data into bits and vice-versa. Before discussing the transmission, it is important to consider an appropriate procedure to convert the input data into the required number of bits.
There are many possible implementations of such procedure. The companion code ak_sliceBytes.m and ak_unsliceBytes.m illustrate a simple implementation that assumes the information to be transmitted is originally organized in bytes. This is a sensible assumption given that most programming languages provide support to reading and writing bytes from/to files and networks.
The implemented function has, as input argument, the number of bits per symbol. The task is to convert each byte (0 to 255 in decimal) to chunks of bits each. Hence, each chunk corresponds to a number in the range in decimal. For example, the command
outputs chunks =[0 4 15 15 1 6]. Note that 3 bytes (24 bits) were properly split into 6 chunks of 4 bits each. The last byte, 22 in decimal, corresponds to 00010110 in binary. Hence, it is split into chunks 0001 and 0110 in binary or, equivalently, 1 and 6 in decimal. In all these manipulations, Matlab/Octave internally treats these values as integer numbers (and may use 64 bits to represent each number, either a “byte” or a “chunk”), but for the sake of digital communication simulations, the important aspect is the dynamic range of the number. The range indicates how many bits are necessary to represent that number. It should be noted that ak_sliceBytes.m has a simple implementation: it is very slow and limited to .
The function ak_unsliceBytes.m performs the inverse operation. The command
recovers the bytes such that outputBytes=[4, 255, 22].
When dealing with sequences of 0’s and 1’s, the functions ak_sliceBitStream and ak_unsliceBitStream can be used. For example, the command ak_sliceBitStream([0 0 1 1 1 1], 3) (the second argument is the number of bits per symbol) outputs [1 7], while the command ak_unsliceBitStream([1 7], 3) recovers the bit stream.
Application 2.3. Packing data into bits and vice-versa using GNU Radio.
In GNU Radio (GR), the bits are typically packed into integers that are called chunks. For example, taking Listing 2.6 as reference, the elements of symbolIndicesTx and symbolIndicesRx are the chunks. One distinction between Matlab/Octave and GR is that in the former the first array index is 1 while it is 0 in GR.
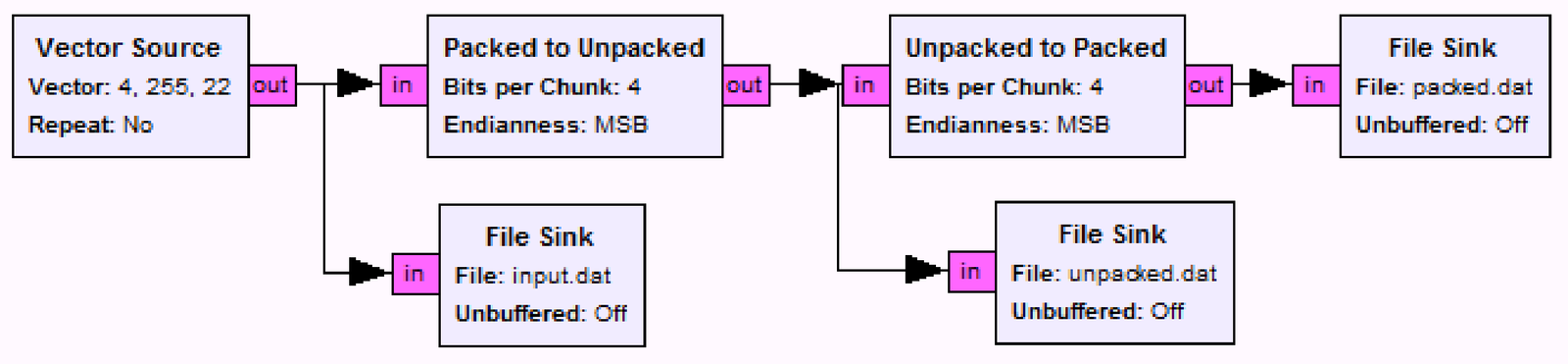
When using GR, the procedures discussed in Application 2.2 are performed by the blocks within the group ‘Misc Conversions’ named ‘Unpacked to Packed’ and ‘Packed to Unpacked’ (assuming GR version 3.6.2). The configuration of these blocks include the input data type (32-bits int, 16-bits short, byte), ordering convention (MSB or LSB) and number of input/output ports.
A simple setup is illustrated in Figure 2.30, with some File Sink blocks added for convenience to save the data (bytes, as binary files).
The generated files can be inspected using Python, for example:
1# reading file sink result 2from numpy import * 3input = list(fromfile(open('input.dat'), dtype=uint8)) 4unpacked = list(fromfile(open('unpacked.dat'), dtype=uint8)) 5packed = list(fromfile(open('packed.dat'), dtype=uint8))
where uint8 indicates the representation as bytes. This code generates the following output:
with the output file packed.dat having the same contents of input.dat. Learning how to perform packing and unpacking is essential to understand GR.
Application 2.4. Some code to estimate SER and BER. The function ak_calculateSymbolErrorRate.m listed in Listing 2.17 estimates the SER.
1function ser=ak_calculateSymbolErrorRate(symIndicesTx,symIndicesRx) 2% function ser=ak_calculateSymbolErrorRate(symIndicesTx,symIndicesRx) 3%Get percentage of wrong symbols (sym) by comparing two sequences: 4numErrors=sum(symIndicesTx ~= symIndicesRx); %number of errors 5N=length(symIndicesTx); %N is the number of symbols 6ser = numErrors / N; %estimated probability of an error
Similarly, the function ak_estimateBERFromBytes.m calculates the bit error probability (BER), or , between two sequences of bytes. For example, the command ber = ak_estimateBERFromBytes([0 254],[255 255]) informs ber = 0.5625, which correctly corresponds to 9 different bits out of 16, i. e., a BER of 56.25%. If the elements are restricted to values 0 or 1, the function ak_estimateBERFromBits.m can be used. The code ak_estimateBERFromBytes.m, for calculating the BER when the data is organized in bytes, is a little more involved and slower than the codes for calculating the SER and ak_estimateBERFromBits.m.
Application 2.5. Transmitting the bytes of a file. Here the channel is assumed noise-free and with unlimited bandwidth. Therefore, it can transmit an infinite number of bits per second without errors. Listing 2.18 provides an example using Hz and bits/symbol. The rate is bps.
1fileHandler=fopen('myfile.bin','r'); %open in binary mode 2if fileHandler==-1 %check if successful 3 error('Error opening the Tx file! Does it exist?'); 4end 5inputBytes=fread(fileHandler, inf, 'uchar'); %read bytes 6fclose(fileHandler); %close the input file 7b=4; %number of bits per symbol 8M=2^b; %number of symbols 9constel = -(M-1):2:(M-1); %create PAM constellation 10%Use oversampling L=1, such that symbol rate = Fs 11Fs=100; %sampling frequency in Hz 12chunksTx = ak_sliceBytes(inputBytes, b); %"cut" bytes 13symbols = constel(chunksTx+1); %get the Tx symbols 14s = symbols; %oversampling=1, send the symbols themselves 15r = s; %ideal channel: received signal = transmitted 16[chunksRx, r_hat]=ak_pamdemod(r,M); %PAM demodulation 17BER = ak_estimateBERFromBytes(chunksTx,chunksRx) %get BER 18recoveredBytes = ak_unsliceBytes(chunksRx, b); %get bytes 19fileHandler=fopen('received.bin','w');%open in binary mode 20if fileHandler==-1 %check if successful 21 error('Error opening the Rx file! Does it exist?'); 22end 23fwrite(fileHandler, recoveredBytes, 'uchar'); %write file 24fclose(fileHandler); %close the file with received bytes
A software such as Linux’s diff can be used to compare the transmitted and received files (for example, diff received.bin myfile.bin), which must be exactly the same.
Note that the sampling frequency was defined in Listing 2.18 but not effectively used. One could simply increase its value to MHz, for example, to have Mbps. The BER would still be zero. Similarly, could be increased without bounds but the ones imposed by implementation issues (ak_sliceBytes limits to 8). Therefore there are two degrees of freedom to achieve infinite high rates under this ideal channel. In the sequel, it will be seen that, roughly, band-limited channels restrict the maximum while AWGN restricts the maximum for a given BER.
Application 2.6. PAM transmission. Other chapters discuss more about how to use group delay, equalization and matched filtering. But before that, it is useful to try an almost complete PAM transmission system. Some concepts may not be clear at this point, but the scripts can be executed again after reading more about the theory.
Listing 2.19 is a complete simulation of a 8-PAM transmission with AWGN added at the receiver with an SNR of 50 dB. The channel is bandpass with a 800 Hz bandwidth (from 3 to 3.8 kHz) and the transmitted signal is upconverted to a carrier frequency of 3400 Hz. The symbol rate is bauds such that the bit rate is bps. All these parameters can be changed to study their impact on the system.
1%PAM example: transmission using frequency upconversion 2%%%%%%%%% Parameters to be changed / tuned %%%%%%%%% 3M = 8; %number of constell. symbols, b=log2(M) bits/symbol 4Fs = 20000; %sampling frequency, Hz 5L = 80; %oversampling factor. Assumed to be an even number 6S = 100; %number of symbols to be transmitted 7channelNumber = 1; %choose the channel, from 0 to 3 (2 is hardest) 8showPlots = 1; %if 1, some plots are shown 9Nequ = 40; %order of equalizer filter 10verify_ISI_atTx = 1; %verify or not ISI at transmitter 11useCorrelationForSync=1; %use crosscorrelation for synchronism? 12%%%%%%%%% Fixed parameters, no need to change %%%%%%%%% 13Fc1 = 3000; %passband channel, lower passband frequency 14Fc2 = 3800; %passband channel, uppper passband frequency 15BW = Fc2 - Fc1; %approximate channel bandwidth 16Fc = (Fc1 + BW/2); %carrier frequency (Hz) 17wc = 2*pi*Fc / Fs; %convert from W in rad/s to w in rad 18%make all channels minimum phase to simplify equalization 19ak_getChannel; %invoke script to get the channel 20B_channel = ak_forceStableMinimumPhase(B_channel,0.1); 21h=impz(B_channel,A_channel,400); %h[n] with 400 samples 22h_equalizer=impz(A_channel,B_channel,Nequ+1); %equalizer 23p = transpose(fir1(L,(BW/20)/Fs)); %shaping pulse (FIR filter) design 24%make sure the sample corresponding to cursor is 1 25cursorIndex=round((length(p)+1)/2); %assumes length(p) is odd 26delayInSamples = cursorIndex; %filter delay equals cursor 27scalingFactor = 1/p(cursorIndex); %find scaling factor... 28p = p * scalingFactor; %to make p(cursorIndex) = 1 29%generate baseband PAM symbols and transmitted signal 30constellat=-(M-1):2:M-1; %PAM constellation 31ind=floor(M*rand(S,1)); %random indices from 0 to M-1 32pamSymbols=transpose(constellat(ind+1)); %sequence of random symbols 33x=zeros(S*L,1); %pre-allocate space 34x(1:L:end)=pamSymbols; %complete upsampling operation 35xp=conv(x,p); %PAM baseband signal 36if verify_ISI_atTx == 1 %check ISI at the transmitter 37 zz=xp(delayInSamples:L:end); 38 disp(['Power of ISI at Tx (should be zero) = ' ... 39 num2str(mean((zz(1:S)-pamSymbols).^2)) ' Watts']) 40end 41%Frequency upconversion: modulate baseband PAM to wc 42filterOrder=transpose(0:length(xp)-1); %"time" axis, as column vector 43carrier = cos(wc*filterOrder); %generate carrier at transmitter 44s = xp .* carrier; %transmitted signal 45%Process signal through the channel 46z=conv(s,h); %note that z is longer than s 47%estimate the channel delay within the passband: 48%[groupDelay,f]=grpdelay(h,1,linspace(Fc1,Fc2,50),Fs)%wrong in Octave 49%[groupDelay,w]=grpdelay(h,1,(2*pi/Fs)*linspace(Fc1,Fc2,50),2*pi); 50[groupDelay,w]=grpdelay(h,1,500); 51wminNdx=find(w >= (2*pi*Fc1)/Fs,1,'first'); %indices for passband 52wmaxNdx=find(w <= (2*pi*Fc2)/Fs,1,'last'); 53channelDelayInSamples=round(mean(groupDelay(wminNdx:wmaxNdx))); %mean 54delayInSamples=delayInSamples+channelDelayInSamples; 55%generate AWGN with desired power 56SNRdB = 50; %desired signal to noise ratio in dB 57SNR=10^(0.1*SNRdB); %SNR in linear scale 58powerRxSignal = mean(abs(z).^2); %signal power at receiver 59noisePower = powerRxSignal/SNR %noise power 60r = z + sqrt(noisePower)*randn(size(z)); %add noise 61r = conv(r,h_equalizer);%equalization (one can eventually disable it) 62%command below did not work on Octave: 63[groupDelay,f]=grpdelay(h_equalizer,1,linspace(Fc1,Fc2,50),Fs); 64[groupDelay,w]=grpdelay(h_equalizer,1,500); %first, get for all range 65wminNdx=find(w >= (2*pi*Fc1)/Fs,1,'first'); %indices for passband 66wmaxNdx=find(w <= (2*pi*Fc2)/Fs,1,'last'); %now only for passband: 67equalizerDelayInSamples=round(mean(groupDelay(wminNdx:wmaxNdx))) 68delayInSamples = delayInSamples + equalizerDelayInSamples; 69%regenerate carrier at the receiver 70filterOrder=transpose(0:length(r)-1); %"time" axis, as column vector 71carrier = cos(wc*filterOrder); %create carrier 72r2 = r .* carrier; %r2 has images at DC and twice wc 73%design receiver filter to eliminate images: 74%Obs: on Matlab, firpmord allows to specify attenuation, e.g. 75%lowpass filter of order n=292 (attenuation 0.01): 76% [n,fo,mo,w]=firpmord([BW/3 BW/2],[1 0],[0.01 0.01],Fs); 77%or lowpass of order n=489 (attenuation 0.001) at stopband: 78% [n,fo,mo,w]=firpmord([BW/3 BW/2],[1 0],[0.001 0.001],Fs); 79% p_rx = firpm(n,fo,mo,w); %then design the filter with given order 80%Instead of firpm, use firls, supported by both Octave and Matlab 81filterOrder=489; %filter order 82p_rx = firls(filterOrder,[0 BW/Fs BW/Fs 1],[1 1 0 0]); %design filter 83disp(['Receiver filter has order = ' num2str(filterOrder)]) 84xphat = conv(r2,p_rx); %filter the received signal 85delayInSamples=delayInSamples+round((length(p_rx)-1)/2); 86if useCorrelationForSync==1 %use xcorr or estimated delay 87 [R,lags]=xcorr(xp,xphat,10*delayInSamples); 88 maxLag=find(abs(R)==max(abs(R)),1,'first'); 89 firstSymSample = abs(lags(maxLag)) + round(L/2); 90else %simply use estimated delay 91 firstSymSample = delayInSamples; 92end 93pamSymbolsRx=xphat(firstSymSample:L:end); %extract symbols 94pamSymbolsRx=pamSymbolsRx(1:S); %eliminate tail 95%normalize the received constellation 96txConstellationPower = mean(constellat.^2); 97rxConstellationPower = mean(pamSymbolsRx.^2); 98pamSymbolsRx = pamSymbolsRx * ... 99 sqrt(txConstellationPower/rxConstellationPower); 100[chunksRx,r_hat]=ak_pamdemod(pamSymbolsRx,M);%demodulation 101SER = 100*sum(pamSymbols ~= r_hat)/S %estimate SER 102symError=pamSymbols-pamSymbolsRx;%calculate signal error 103SNRrx_before_detection = 10*log10(mean(pamSymbols.^2)/... 104 mean(symError.^2)) %SNR before detection 105symError = pamSymbols - r_hat; %after detection 106SNRrx_after_detection = 10*log10(mean(pamSymbols.^2)/... 107 mean(symError.^2)) 108Rsym = Fs/L; %symbol rate (in bauds) 109Rbps = Rsym * log2(M); %bit rate (in bps) 110disp(['Rate = ' num2str(Rbps) ' bps']) %show rate 111if (showPlots==1) figs_pamSimple; end %show plots
The variable channelNumber is used by the function ak_getChannel, which allows to choose among 4 channels. The companion script figs_pamSimple shows the transmitted (TX) and received (RX) PSDs, the channel frequency response and group delay, etc. The script uses a zero-forcing equalizer designed in line h_equalizer=impz(A_channel,B_channel,Nequ+1), which simply inverts the channel. This strategy is problematic if the channel is not minimum-phase because the zeros of the channel outside or on the unit circle will be poles of the equalizer that will make it unstable (see Application E.16). Because of that, the function ak_forceStableMinimumPhase is used to eventually modify the original channel and make it minimum-phase, which allows to use such simple equalization strategy. A more practical method is to force the equalizer to be stable, even if the channel is not minimum-phase.
There are several filtering stages and each one adds a delay to its input signal. The variable delayInSamples keeps track of the total delay (in samples) and allows to perform a simple timing recovery.
Using the original code (without modifications), it should be noticed that channelNumber=3, which corresponds to having a FIR filter as channel, leads to a symbol error rate (SER) of 0. However, channelNumber=2, which corresponds to using an elliptic IIR filter as channel, leads to a nonzero SER. The reason is that this receiver does not use matched filtering and its default synchronization relies on delayInSamples, which is a fragile timing recovery strategy when the group delay varies significantly in the signal bandwidth. In fact, realigning the demodulated and transmitted symbols by just one symbol using plot(r_hat(1:end-1)-pamSymbols(2:end)) leads to the desired zero SER. It helps to see the received constellation to realize that the problem was timing, because the received symbols were clustered around the transmitted symbols. And to find the lag to use to realign, the xcorr function can be used. However, the goal is always to have an algorithm running an automatic estimation and not rely on manual adjustments. A more accurate timing recovery, vastly used in practice, can be obtained with cross-correlation by setting useCorrelationForSync=1, which then uses the method discussed in Application C.11.
Note that the cross-correlation can be used in the symbol or sample-domain, i. e., using sequences at rate or , respectively. It is more accurate to work with the samples at but more computationally complex. Listing 2.19 illustrates with [R,lags]=xcorr(xp,xphat,10*delayInSamples) a strategy that is commonly used in practice: restrict the cross-correlation calculation to a specific (the narrowest possible) range of lags, in this case 10*delayInSamples.
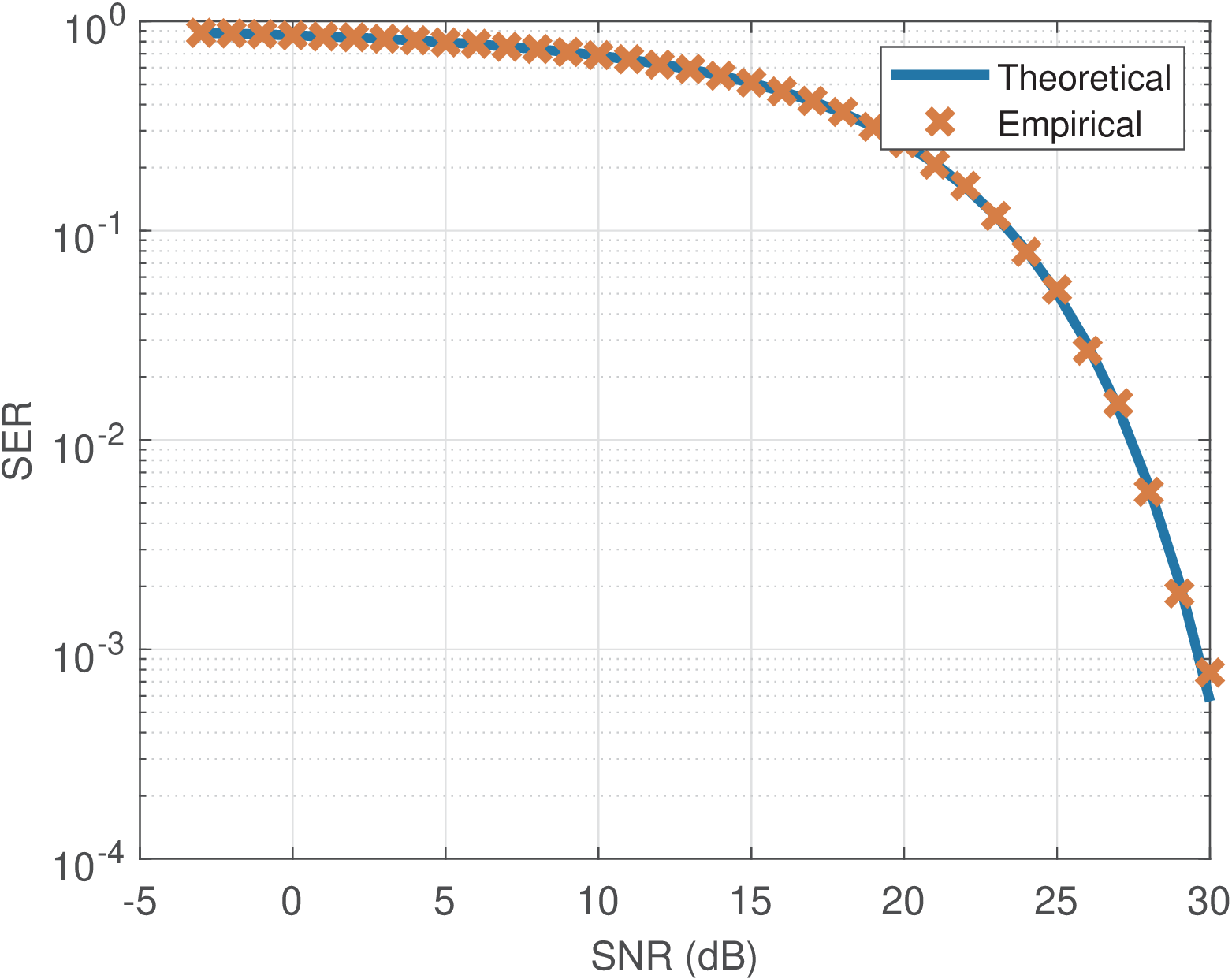
Application 2.7. Comparing theoretical SER with the ones obtained by symbol-based PAM simulation. Having the possibility of comparing to the theoretical SER is useful to validate implementations. To do that, it is necessary to generate signals with a given SNR. This can be done by properly scaling the signal or the noise. Most times it is not important which one is scaled. Listing 2.20 provides an example that scales the noise to obtain the SNRs of interest.
1M=16; %modulation order 2snrsdB=-3:30; %specified SNR range (in dB) 3snrs=10.^(0.1*(snrsdB)); %conversion from dB to linear 4numberOfSymbols = 40000; %number of symbols 5alphabet = [-(M-1):2:M-1]; %symbols of a M-PAM 6symbolIndicesTx = floor(M*rand(1, numberOfSymbols)); %randomly 7s = alphabet( symbolIndicesTx +1); %transmitted signal 8signalPower = mean(alphabet.^2); %signal power (Watts) 9for i=1:length(snrs) %loop over all SNR of interest 10 noisePower = signalPower/snrs(i); %noise power (Watts) 11 n = sqrt(noisePower)*randn(size(s));%white Gaus. noise 12 r = s + n; %add noise to the transmitted signal 13 symbolIndicesRx = ak_pamdemod ( r, M); %decision 14 SER_empirical(i) = sum(symbolIndicesTx ~= ... 15 symbolIndicesRx)/numberOfSymbols%Symbol error rate 16end 17%Compare empirical and theoretical values of SER: 18SER_theoretical=2*(1-1/M)*qfunc(sqrt(3*snrs/(M^2-1))); 19semilogy(snrsdB,SER_theoretical,snrsdB,SER_empirical,'x');
The theoretical SER for PAM over AWGN is discussed later and given by Eq. (5.10), which is implemented with the command
in this case.
Figure 2.31 was generated with the previous code and shows a good match between the simulated (empirical) SER and its theoretical expression Eq. (5.10) for the given range of SNRs. These simulations are called Monte Carlo simulations and the empirical results sometimes are labeled Monte Carlo results.
Application 2.8. Correspondences between convolution, correlation and inner product when using orthogonal expansions for transmission. The goal here is to understand how correlative decoding can be implemented in software. This can be achieved with cross-correlations, convolutions or even transforms.
Listing E.4 already demonstrated the correspondence between convolution and correlation. Now, Listing 2.21 shows an example where an inner product is obtained via a single value of a cross-correlation or a convolution.
1N=4; %length of vectors for inner product 2x=(1:N)+j*(N:-1:1); %define some complex signals as row vectors, such 3y=rand(1,N)+j*rand(1,N); %that fliplr inverts the ordering 4innerProduct = sum(x.*conj(y)) 5innerProductViaXcorr=xcorr(x,y,0) %cross-correlation at origin 6innerProductViaConv=conv(x,conj(fliplr(y))); %use the second argument 7innerProductViaConv=innerProductViaConv(N) %sample of interest
The inner products in Figure 2.26 can also be organized as a matrix multiplication. This gives a direct relation between the architecture of Figure 2.26 and a block transform. To illustrate that, Listing 2.22 uses matrices obtained via a Gram-Schmidt orthonormalization procedure to implement correlative decoding. Other transforms could be used, as long as the basis functions of Figure 2.26 are properly mapped to the basis functions of the transform.
1demodulationMethod='conv' %choose among: 'inner', 'xcorr' or 'conv' 2SNRdB = 30; %AWGN SNR in dB 3S=10000; %number of symbols to be generated 4D=16; %space dimension, equivalent to oversampling factor 5x=[ones(1,D) %define all possible transmit signal as row vectors 6 -ones(1,D) 7 ones(1,D/2) zeros(1,D/2) 8 zeros(1,D/2) ones(1,D/2)]; 9[M, temp] = size(x); %M is the number of input vectors, obs: temp = D 10%M is also the modulation order (cardinality of the set of symbols) 11[Ah,A]=ak_gram_schmidt(x,1e-12); %basis functions are columns of A 12[N, temp] = size(Ah); %N is the number of basis functions (temp = D) 13constellation=Ah*transpose(x); %find the constellation symbols 14%% Transmitter 15txIndices=floor(M*rand(1,S)); %random indices from [1, M] 16m=constellation(:,txIndices+1); %obtain N random symbols 17s=A*m; %obtain the signal to be transmitted (one column per symbol) 18s=s(:); %concatenate all columns to create a one-dimensional signal 19%% Channel 20noise=sqrt(mean(abs(s).^2)/10^(0.1*SNRdB))*randn(S*D,1); %AWGN noise 21r=s+noise; %add noise with specified SNR 22rxSamples = reshape(r,D,S); %reorganize the samples as D x S matrix 23%% Receiver 24rxSymbols = zeros(N,S); %pre-allocate space 25switch demodulationMethod %choose the demodulation "architecture" 26 case 'inner' % Receiver via inner product (transform) 27 rxSymbols = Ah*rxSamples; %symbols that represent signal 28 case 'xcorr' % Receiver via cross-correlation 29 for n=1:N %loop over all basis functions 30 [R,lags]=xcorr(r,A(:,n)); %n-th basis function 31 rxSymbols(n,:)=R(find(lags==0,1):D:end); %decimate 32 end 33 case 'conv' % Receiver via convolution 34 for n=1:N %loop over all basis functions 35 innerProductViaConv=conv(r,fliplr(A(:,n)'));%could use Ah 36 rxSymbols(n,:)=innerProductViaConv(D:D:end); %decimate 37 end 38end 39[rxIndices,m_hat]=ak_genericDemod(rxSymbols,constellation); %Decision 40SER=sum(rxIndices ~= txIndices)/S %estimate the symbol error rate
Besides the transform-based implementation, Listing 2.22 also illustrates how a convolution and cross-correlation can be used for correlative decoding, providing the same result as an inner product. Choosing demodulationMethod in Listing 2.22, three distinct but equivalent (with respect to the output result) signal processing chains can be tested. For the suggested SNR of 30 dB, the system achieves a symbol error rate that is equal to zero.
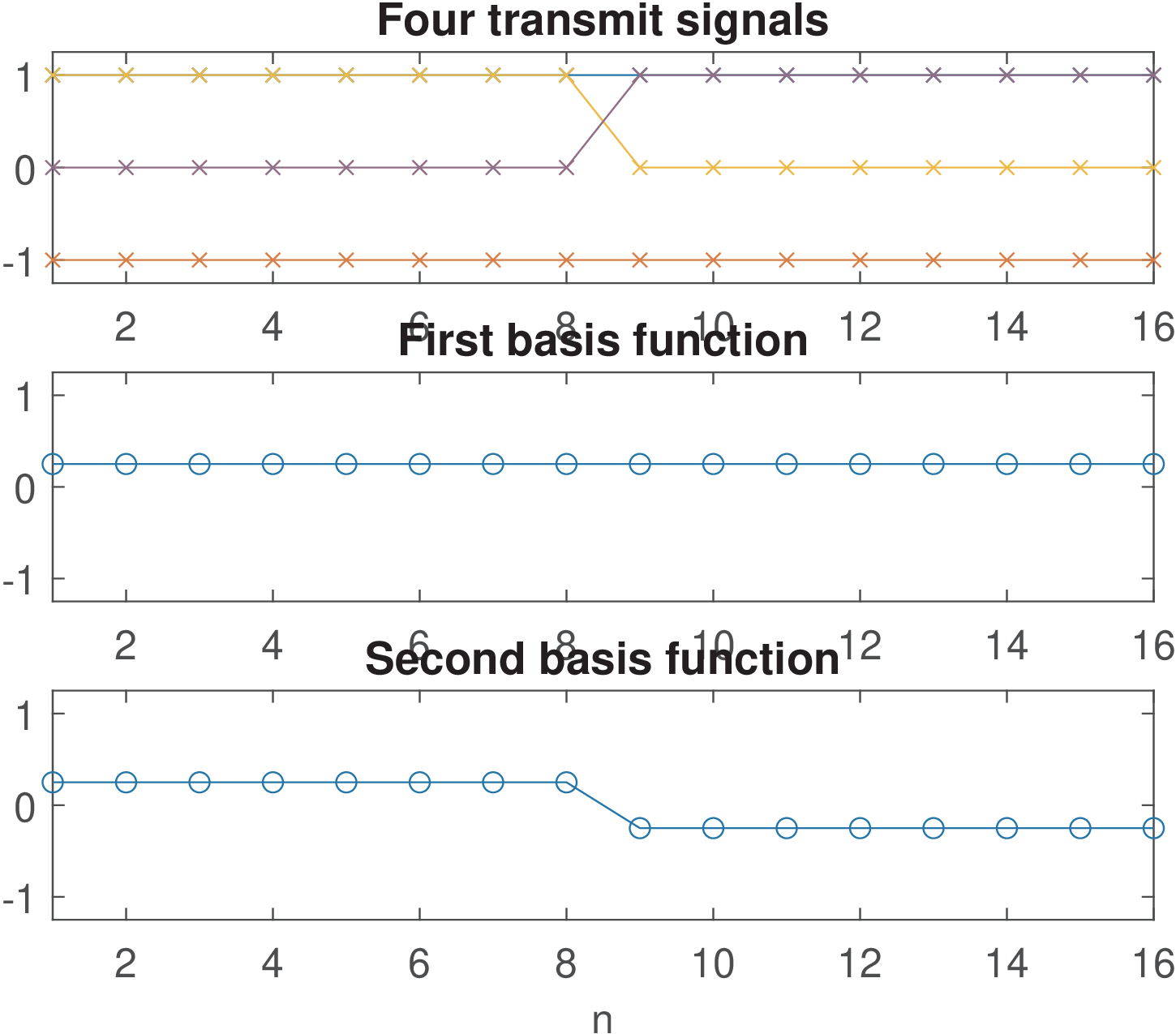
In Listing 2.22, the waveforms in matrix x can be represented by two basis functions derived by the Gram-Schmidt procedure. Figure 2.32 depicts both the waveforms in x (top plot) and the basis functions. The first waveform (row of x) is ones(1,D) and is the middle plot in Figure 2.32.
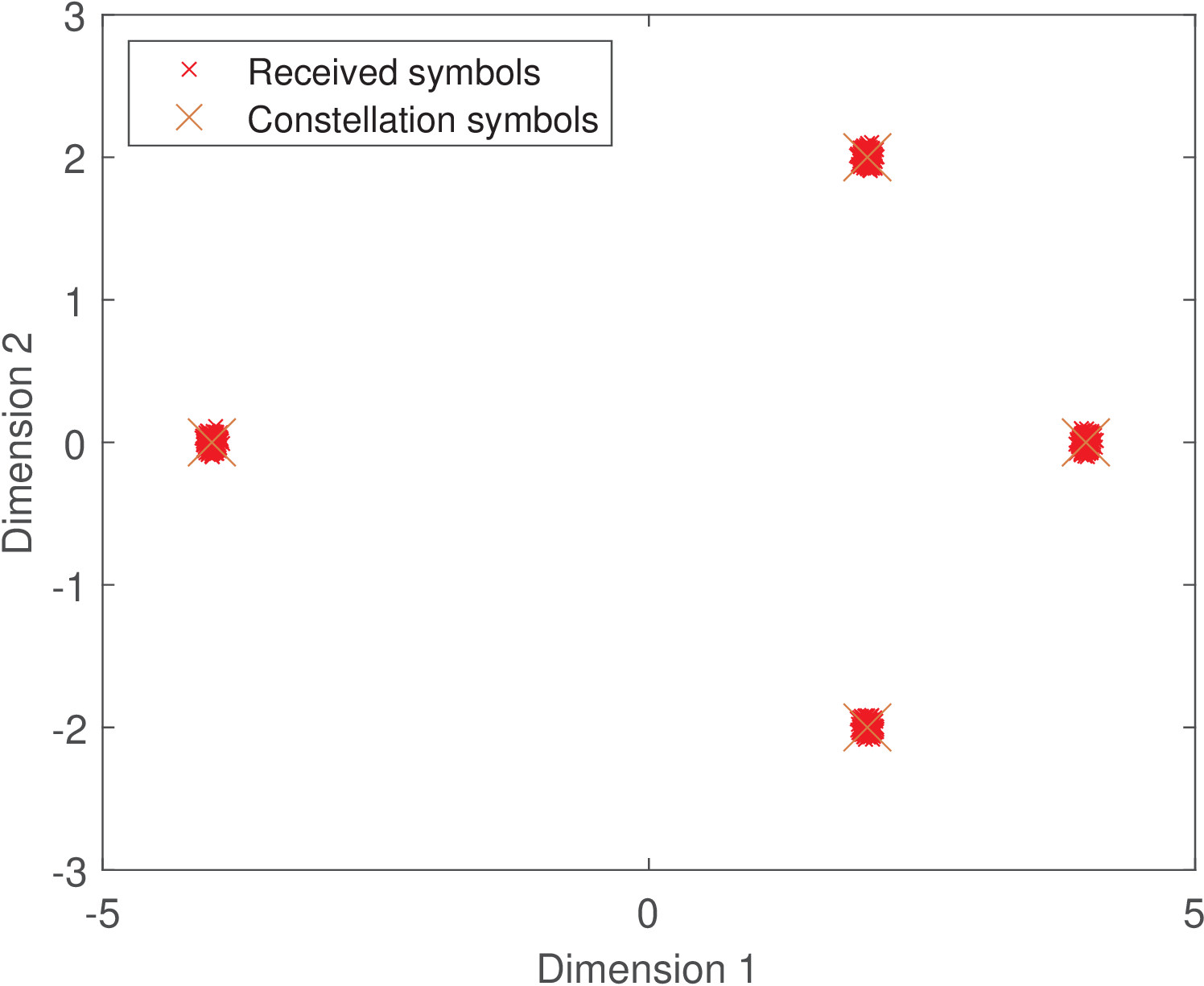
Figure 2.33 shows the corresponding constellation with symbols , , , . Because x was chosen just to provide a simple example, the resulting constellation is non-orthodox because it does not follow the guidelines discussed in Section 2.7.1 (in the context of PAM constellations). For example, its average is not at the origin!
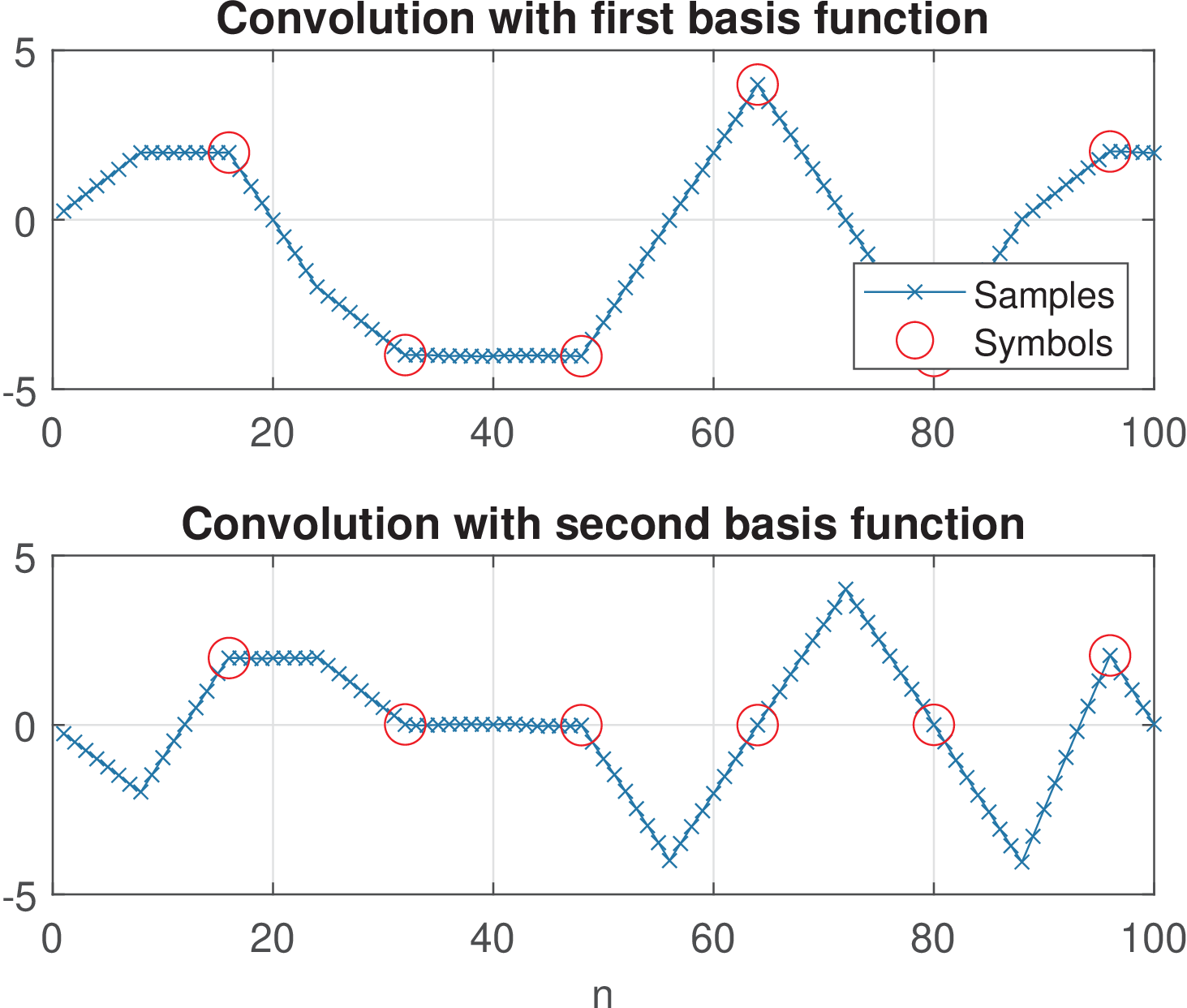
Using Figure 2.26 as reference, the basis functions and in Listing 2.22 are stored in A(:,1) and A(:,2), respectively. The received signal is processed using each basis functions, in parallel, as suggested by Figure 2.26. In case the method is ’xcorr’ or ’conv’, this parallel processing is explicit, but it is equivalent to the multiplication by the transform matrix in rxSymbols = Ah*rxSamples.
Figure 2.34 shows the convolution output for both basis functions. The symbols (indicated as circles) are obtained with a decimation by D=16. It can be seen from Figure 2.34 (or inspecting m_hat) that the first four decoded symbols are , , , . To obtain these results, the symbols must be extracted with the proper timing. For example, for the ’conv’ method, the first symbol is at sample and, after that, at intervals of D=16 samples, the convolution outputs coincide with the desired inner product of the received signal r with the basis functions.
Application 2.9. Cyclostationary analysis in frequency domain. The next paragraphs explore the spectral-correlation density function (SCD), which allows to observe “hidden” periodicities that are not observable via the PSD [Gar91]. The SCD is also discussed in Section A.18.3 and a motivation for using cyclostationary analysis for carrier recovery is described in Listing 4.19.
Listing 2.23 illustrates the SCD estimation using the companion autofam.m function, which implements the FFT Accumulation Method (FAM) [RBLJ91] and is similar to the one implemented in the GNU Radio Spectral Estimation Toolbox [ url9grs].
1numberOfSymbols = 1000; %number of symbols to be transmitted 2Fc = 1000; %carrier frequency (Hz) 3Fs = 8000; %sampling frequency (Hz) 4df = 80; %frequency resolution (see [Gardner, 1991]) 5dalpha = 20; %cyclic frequency resolution 6L = 12; %oversampling factor 7b=4; %number of bits per symbol 8pulseOption=2; %Choose a pulse option=1 or 2 9%% Generate PAM signal 10Rsym = Fs/L; %symbol rate (bauds) 11M=2^b; %constellation order 12symbolIndicesTx = floor(M*rand(1,numberOfSymbols)); %random symbols 13constellation = pammod(0:M-1, M); %PAM constellation 14symbols = pammod(symbolIndicesTx,M); %obtain PAM symbols from indices 15%convert symbols into a waveform. 16switch pulseOption 17 case 1 18 p = ones(1,L); %define a simple rectangular shaping pulse 19 case 2 20 r = 0.5; % Roll-off factor 21 delay = 3; %group delay in symbles (at Rsym) 22 p = ak_rcosine(Rsym,Fs,'fir/normal',r,delay); 23end 24p = p / (mean(p.^2)); %make sure pulse has unitary power 25signal = zeros(1,numberOfSymbols*L); %pre-allocate space 26signal(1:L:end) = symbols; %organize the symbols 27signal = filter(p,1,signal); %pulse shaping filtering 28wc=2*pi*Fc; %carrier frequency in rad/s 29x = real(signal.*exp(1j*wc*(0:length(signal)-1)*(1/Fs))); 30%%Cyclostationary analysis 31[Sx, alphao, fo] = autofam(x,Fs,df,dalpha); %estimate the SCD 32cyclicProfile = max(Sx,[],1); %estimate the cyclic profile 33figure(1), plot(alphao,cyclicProfile/max(cyclicProfile));
The SCD is a two-dimensional function that depends on frequency and “cycle” frequency . After executing Listing 2.23, the SCD in Figure 2.35 (see, e. g., [Gar91] for further discussion) was obtained with the command
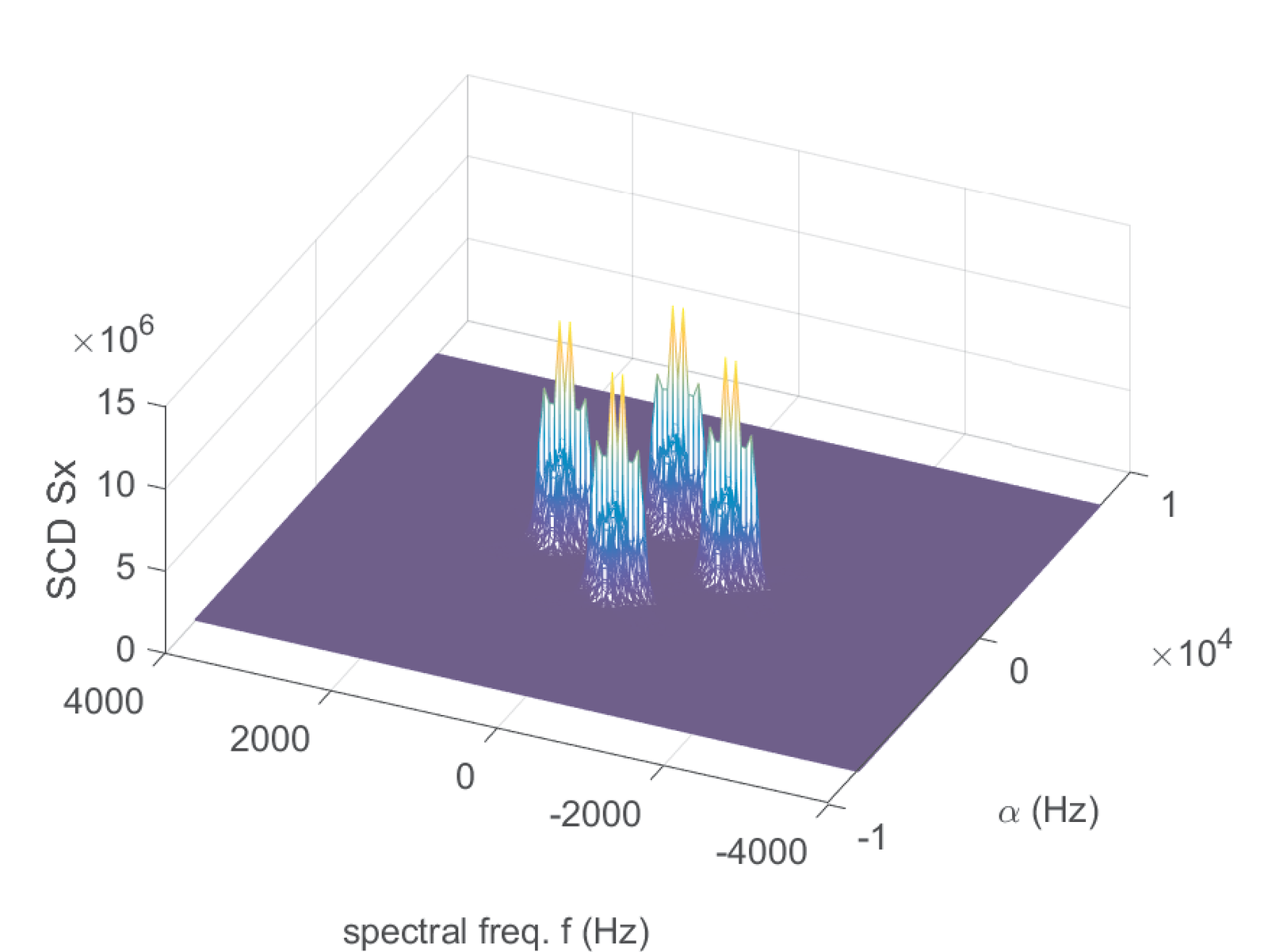
Given that the carrier frequency is kHz, one can observe spectral lines at the cycle frequency kHz. The maximum value over all frequencies for each can be used to define a cyclic or -profile that can then used to identify the adopted modulation [FGR05].
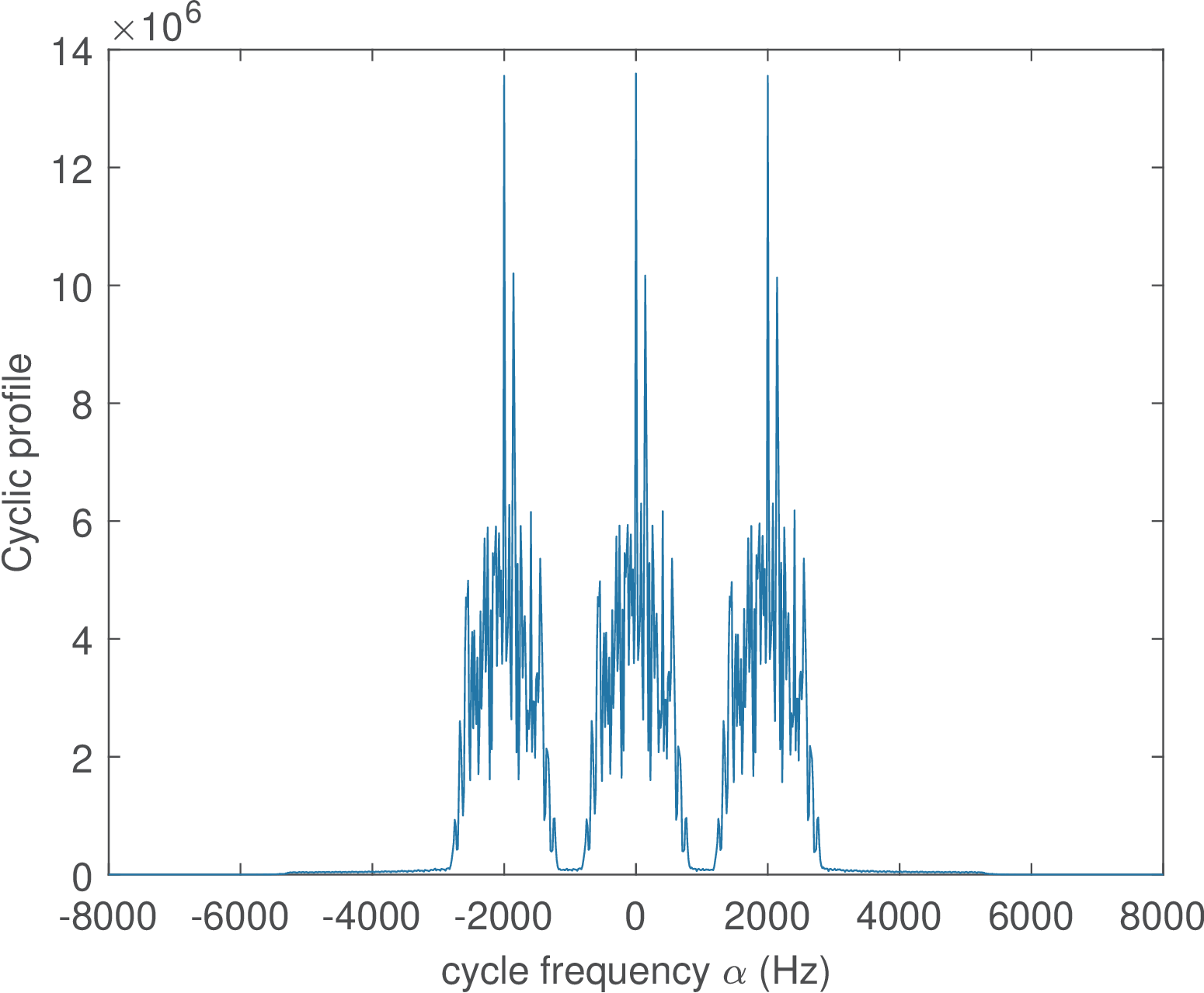
Figure 2.36 shows the result of converting Figure 2.35 to the one-dimensional representation provided by its respective cyclic profile.