A.29 System Properties
It is useful to characterize systems according to well-defined properties. Some of the most important properties are: linearity, time invariance, causality, stability, invertibility and memory. In the next subsections, it is assumed that the inputs , and lead to the outputs , and , respectively (note it is not assumed the system is LTI).
A.29.1 Linearity (additivity and homogeneity)
Linearity is a composition of two properties: additivity and homogeneity. A system (or an operator) is additive if it obeys
which indicates that its output to the sum of two signals is equal to the sum of the two outputs and obtained independently for and , respectively.
If a system is described by the relation it is additive. The proof is as follows. When one has
On the other hand, a system with is not linear because
A system is homogeneous in case
where . In this case, if the input is multiplied by , the output is multiplied by the same factor . For example, the system does not obey homogeneity because
On the other hand, can be proved to be homogeneous. Because it is also additive, is a linear system.
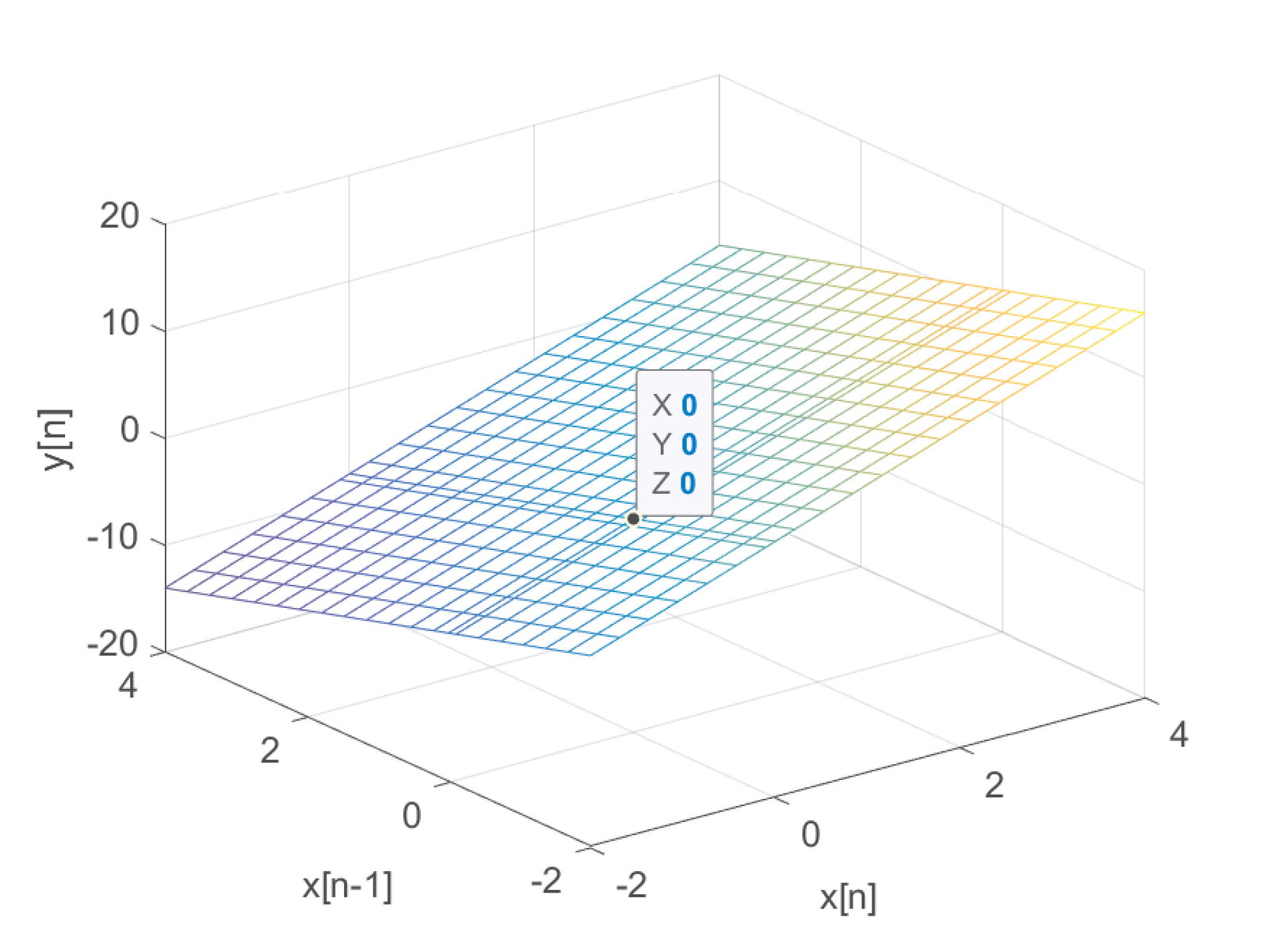
To provide a geometrical description of linearity, Figure A.35 depicts the possible outputs of the system as triples . The plot shows the output when and are obtained from a grid of 400 Cartesian points in the range . It can be seen that, as required for a linear system, the input leads to . In contrast, the system is not linear (neither additive nor homogeneous). A linear system is required to respond to an all zero input with an all zero output .
Linearity is also called the principle of superposition and can be written as
A.29.2 Time-invariance (or shift-invariance)
A system is time-invariant in case
or, in the discrete-time case: , which is also called shift-invariant.
Time-invariance is equivalent to having the output delayed (or anticipated) by the same amount that the input was. A valid analogy is to consider that someone has a strict personal routine, which consists in waking-up at 7am, having breakfast at 8am, brushing teeth at 9am and so on. This person would be time-invariant if, in case it wakes-up late, at 10am, it would keep the same routine with a delay of 3 hours: breakfast at 11am, brushing teeth at noon, etc.
A system is not time-invariant. To prove it, one can observe that for an input , the output is (because ). Now, if one delays the input by , to create a new input the output is , which is different from having the output delayed by the same amount and get , which should be expected for a time-invariant system.
It is easier to prove that a property is not respected because it suffices to give a single example that violates the property. However, to prove that a system obeys a property, this must be done in a general setting, to prove that it works for all signals. To practice this kind of general proof, let us continue with the system . The output to is while time-invariance would require the output to be . Before stating a general proof, it is convenient to work out a simple example.
As another example, the system is time-invariant because for the output is .
A.29.3 Memory
A memoryless system has the output at time depending only on the input at time . This means that the output of a memoryless system does not depend of any past or future history of the input. For example, in analog filters, the resistor is a component that does not have memory, while the capacitor and inductor have. The current-voltage relation for a resistor is (memoryless) while for a capacitor it is , which depends of the variation of with time.
It is relatively easy to identify memory in the discrete-time domain because it can be related to the actual storage space called “memory” in computing systems. For example, the system is memoryless, while has to store one previous value () of the input and 15 previous values () of the output. As illustrated in Listing E.12, all these values need to be stored in “memory” positions. The storage space for and is not accounted, even if in practice they require space. For example, assuming the values are represented as 4-bytes “floats”, the previous system would require bytes of RAM “memory” to store the system memory.
A.29.4 Causality
A system is causal if the output at instant depends only on , i. e., does not depend on future values of the input. All physical systems are causal because they cannot react to something that will occur in future.26 It is possible to implement a non-causal system if the signal is processed “off-line”, i. e., the samples are pre-stored and the processing is done without concerns to the real life time. The function filtfilt in Matlab/Octave is an example of non-causal processing that is very useful because can filter the magnitude of a signal without influencing its phase.
The system is non-causal because depends on . On the other hand, the system is causal because the time index can be rearranged (via a change in variable: ) and the system rewritten as . As a general rule to check causality, one can look at the output value most advanced in time ( in previous example), change variables with , isolate and check if it depends on future values of the input. For example, the system is non-causal. This is clear if it is rewritten as .
A.29.5 Invertibility
A system is invertible if the input signal can be uniquely determined from the output. This is similar to the concept of an injective function. For example, is invertible because , but is not. In general, a system is invertible if it is possible to find another system such that their cascade replicates the input, as illustrated below:
A.29.6 Stability
The output of an unstable system can eventually grow unbounded and go to infinite. This is typically undesirable and suggests the so-called bounded-input, bounded-output (BIBO) stability. A system is BIBO stable if the output is bounded whenever the input is bounded. Note that if the input grows unbounded, then a stable system can have its output converging to infinite. In other words, looking only at the output one cannot state whether or not a system is stable. For example, the system is BIBO stable, but if , then . On the other hand, the system is not BIBO stable, because the bounded input , leads to .
A.29.7 Properties of linear and time-invariant (LTI) systems
If an LTI system is memoryless, its impulse response is non-zero only at (or ). In other words, . is causal if and only if (i. e., the output does not effectively start until the impulse is applied at ). If an LTI system with impulse response is invertible, the inverse system is also LTI and has an impulse response that obeys . To be BIBO stable, the LTI must have the impulse response absolutely summable or integrable, i. e.
|
| (A.122) |
depending if the system is discrete or continuous in time, respectively.